

Calculation method of subsatellite points and photographic point trajectory self-intersection points of near-earth regression orbit satellite
A technology of return orbit and calculation method, which is applied in the field of remote sensing satellites, and can solve problems such as easy loss, large amount of calculation, and long intervals of adjacent observations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
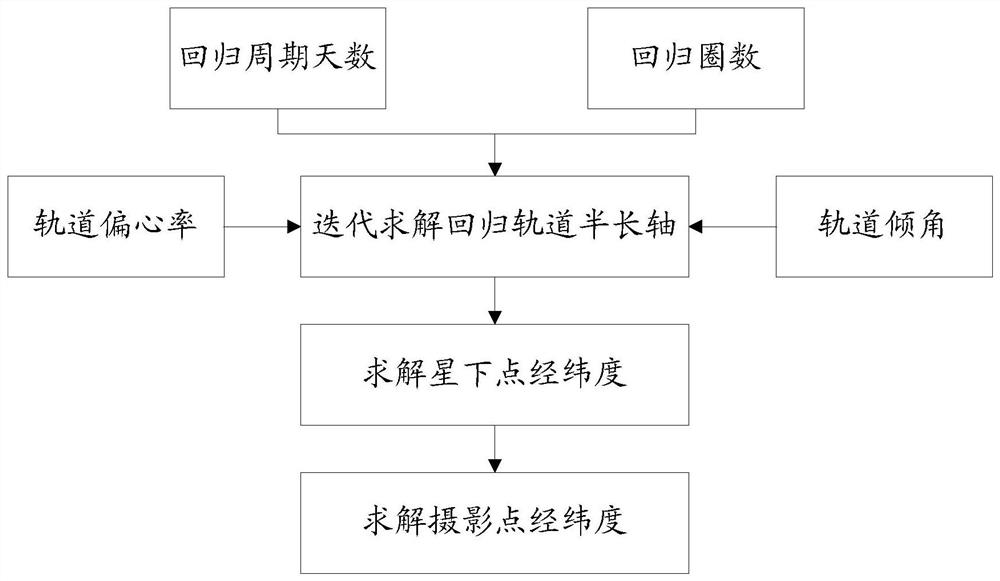
[0097] Such as figure 1 , in this embodiment, the calculation method of the sub-satellite point of the low-Earth orbit satellite and the self-intersection point of the photographic point track includes:
[0098] Step 101, iteratively solve the semi-major axis of the regression orbit according to the orbit inclination, the orbit eccentricity, the number of days of the regression cycle and the number of regression cycles.
[0099] In this embodiment, the specific solution process of the semi-major axis of the regression orbit can be as follows:
[0100] a) Select orbital eccentricity e, orbital inclination i, return period days D and return circles N.
[0101] First, select the orbital eccentricity e and orbital inclination i.
[0102] Then, according to the selected orbital eccentricity e and orbital inclination i, the earth flattening perturbation coefficient J 2 The following orbital parameters:
[0103]
[0104]
[0105]
[0106] Among them, Ω represents the rig...
Embodiment 2
[0175] On the basis of the above-mentioned embodiment, the following will be described in conjunction with an example.
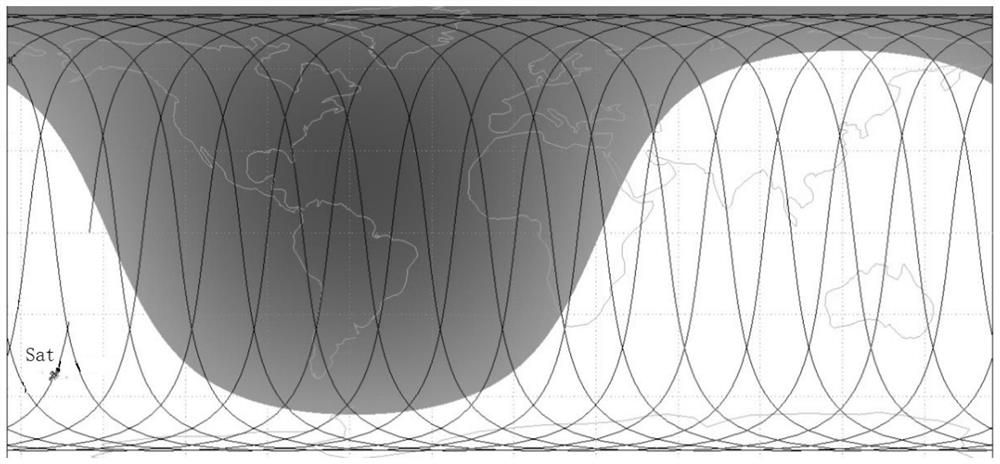
[0176] In this embodiment, the trajectories of sub-satellite points and photographic points are as follows image 3 and Figure 4 As shown, the central part of the trajectory is the sub-satellite point trajectory, and the side trajectory is the photography point trajectory. The central area and boundary range of the coverage can be determined by the self-intersection points formed by the sub-satellite point trajectory and the photography point trajectory respectively.
[0177] The specific calculation steps are as follows:
[0178] (1) Select the following parameters: e=0, i=94 °; estimate D=3, N=29 according to the initial value of the orbital height; set J 2 The drift rates of ascending node right ascension, argument of perigee and true anomaly under perturbation are expressed as a function of the semi-major axis of the regression orbit.
[0179] In ord...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More