Biped robot lower limb structure based on modular joints
A biped robot and modular joint technology, applied in the field of lower limb structure of biped robots, can solve the problems of large inertia, unfavorable stable walking of biped robots, low center of gravity, etc., and achieve easy maintenance, improve interchangeability, and reduce costs. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described in detail below with reference to the accompanying drawings.
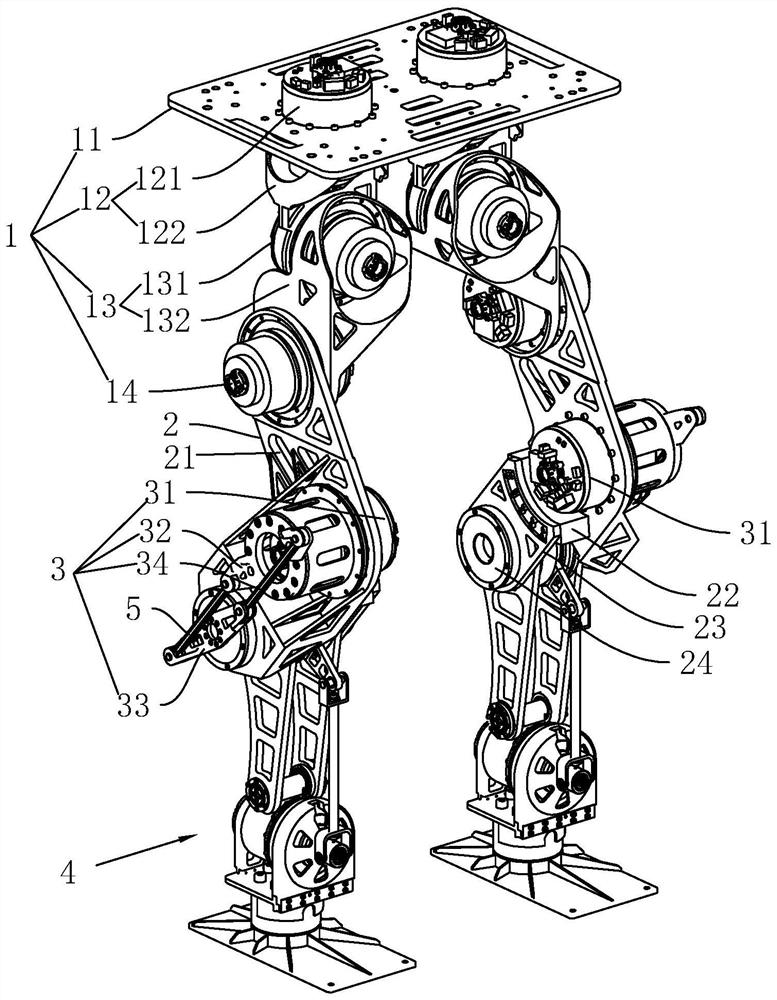
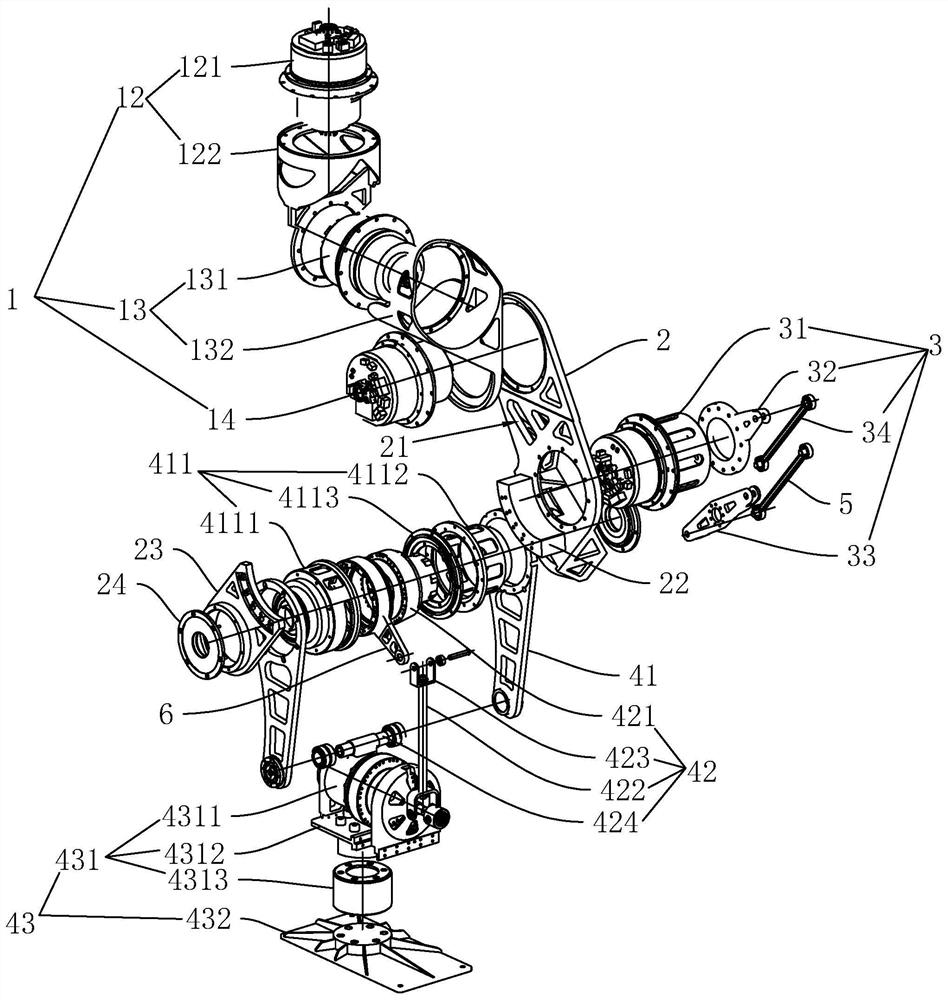
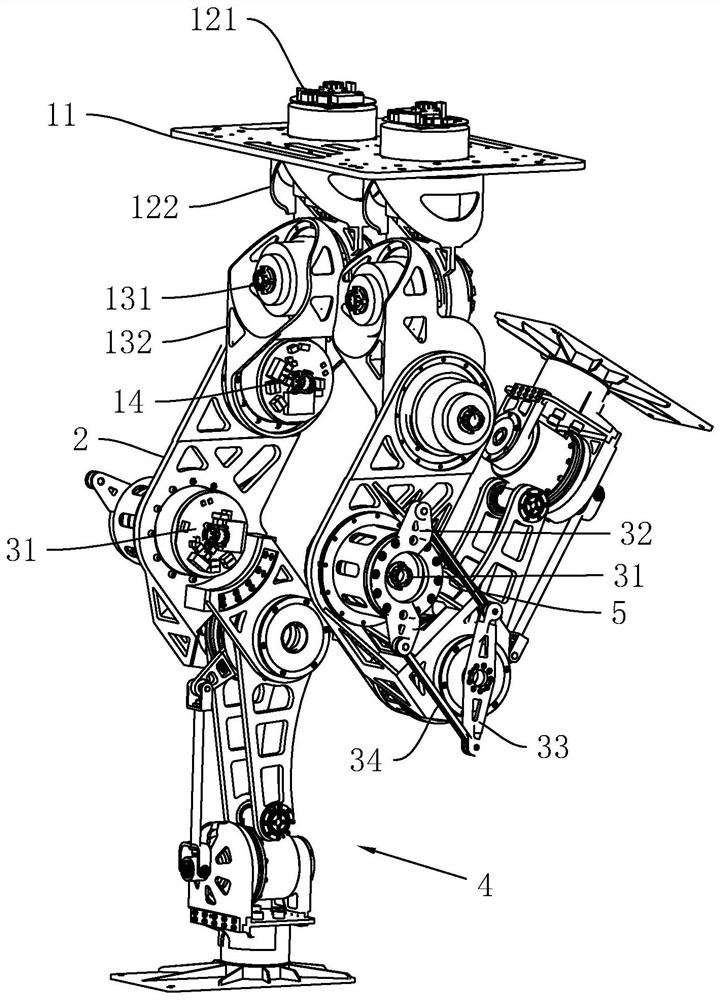
[0037] refer to figure 1 and figure 2 , which is a lower limb structure of a biped robot based on modular joints disclosed in the present invention, which raises the center of gravity of the feet, so that the inertia of the feet will be smaller when swinging, which is helpful for the stable walking of the feet, including: Left and right feet, the left and right feet are vertically parallel, and the parts on the left and right feet are mirror images of each other, so as to facilitate the exchange of the upper parts of the left and right feet; the single foot includes: hip joint mechanism 1, thigh piece 2 , Knee joint mechanism 3 and calf mechanism 4, the lower end of the hip joint mechanism 1 is rotatably connected with the upper end of the thigh piece 2, the hip joint mechanism 1 is used to drive the knee joint mechanism 3 and the calf mechanism 4 to swing ba...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



