

Repositioning method and system based on mobile robot
A mobile robot and relocation technology, applied in the field of relocation, can solve the problems of low positioning accuracy of mobile robots, long calculation time, affecting robot accuracy, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
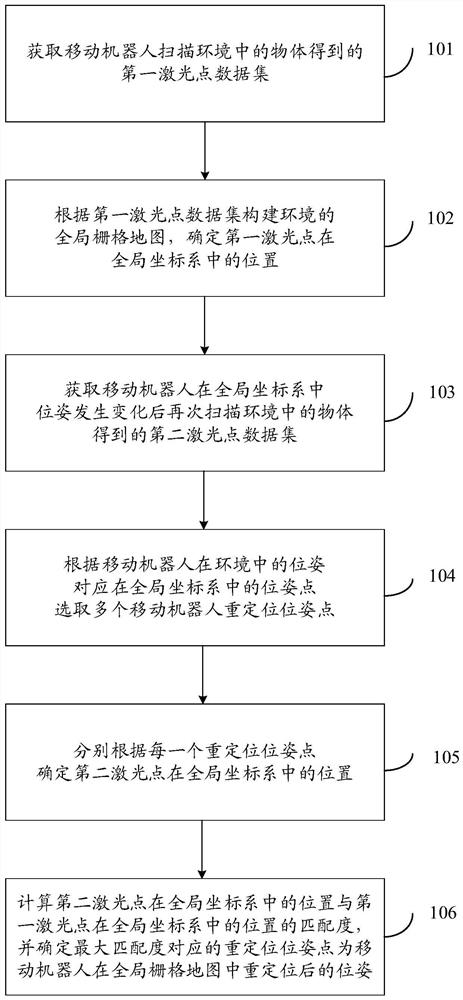
[0071] figure 1 It is a flowchart of a relocation method based on a mobile robot in an embodiment of the present invention, such as figure 1 As shown, a kind of mobile robot-based relocation method provided by the present invention includes:
[0072] Step 101: Obtain a first laser point data set obtained by scanning objects in the environment by the mobile robot; the first laser point data set includes a plurality of first laser points.
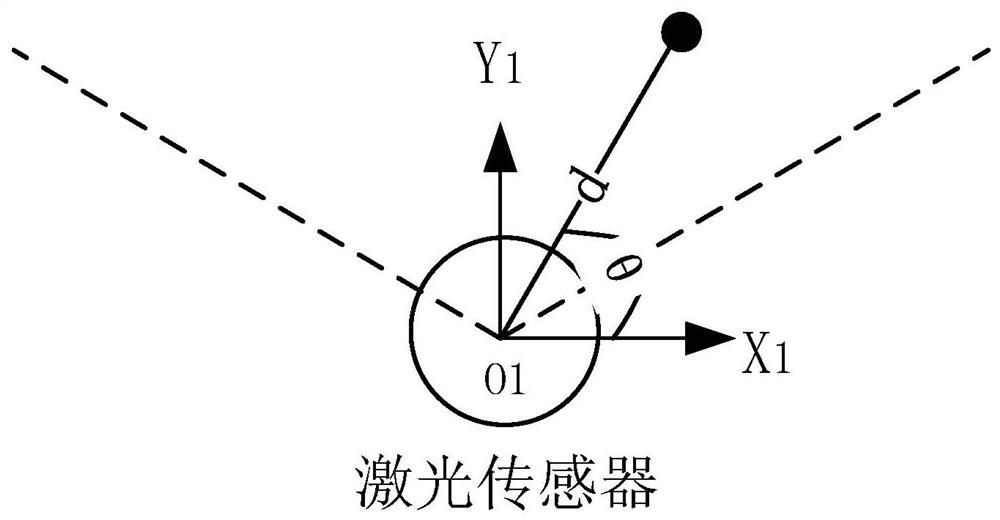
[0073] figure 2 It is a schematic diagram of laser sensor measurement data in the embodiment of the present invention, figure 2 In the laser sensor coordinate system, the horizontal axis is X1, and the vertical axis is Y1, such as figure 2 As shown, the mobile robot moves in the environment. The laser sensor mounted on the mobile robot emits a laser beam to scan the surrounding environment in real time, and measures each object in the environment in the laser sensor coordinate system to obtain the first laser point data set. The laser s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More