

Craniotomy robot system and craniotomy method thereof
A surgical robot and surgical technology, applied in the field of medical robots, can solve problems such as high difficulty, dependence on doctor's experience, and high operating intensity of doctors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the following embodiments in no way limit the present invention.
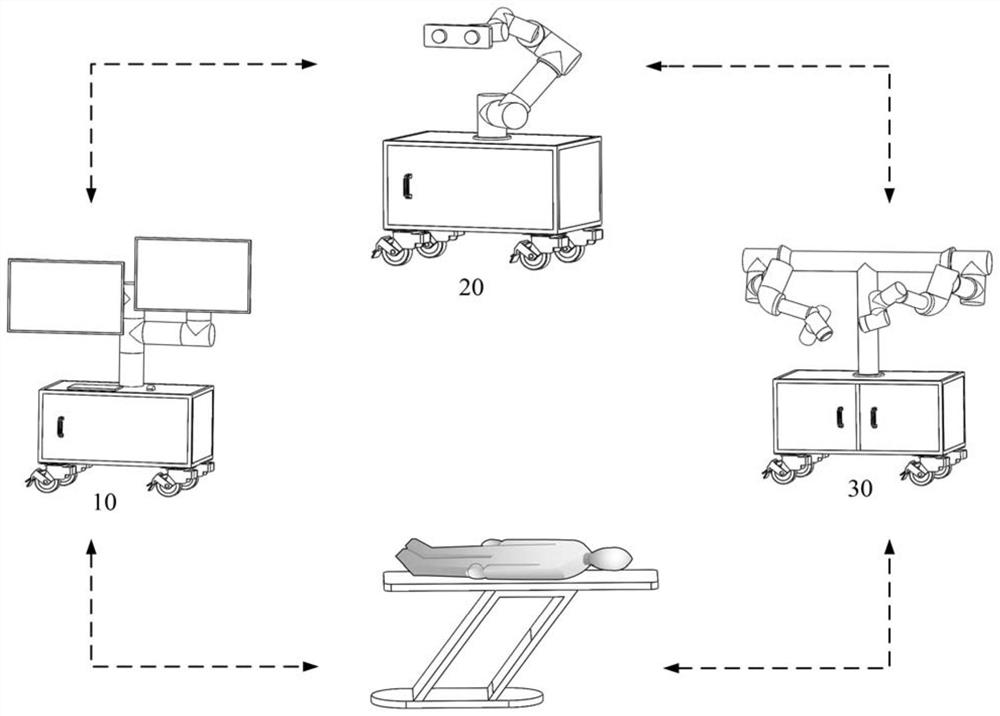
[0027] Such as figure 1 As shown, the craniotomy robot system includes a data processing mechanism 10 , a cooperative optical navigation mechanism 20 and a dual-arm surgical robot mechanism 30 .
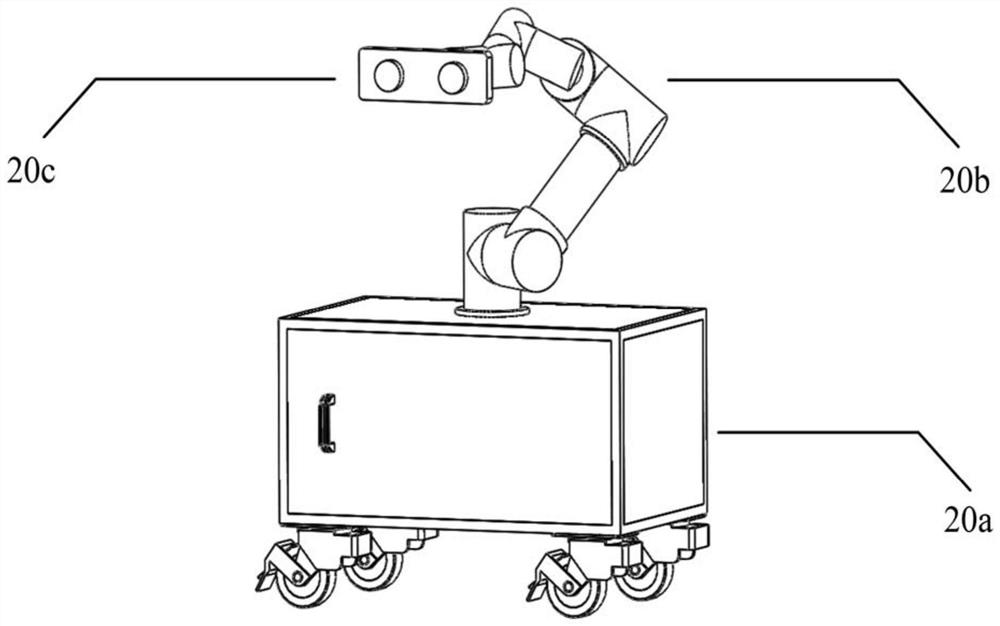
[0028] Such as image 3 and Figure 5 As shown, the cooperative optical navigation mechanism 20 includes a navigation trolley 20a, a six-degree-of-freedom navigation manipulator 20b and an optical locator 20c; specifically, the navigation trolley 20a is a box-type vehicle body, and its bottom is provided with four The rolling wheels of the vehicle body, and a self-locking mechanism is arranged at each rolling wheel, and after the vehicle body moves to an appropriate position, the navigation trolley 20a is fixed at this position through the self-locking mechanisms respectively arran...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More