Coal mine tunnel inspection robot system integrating monocular vision and IMU and navigation method
A technology for inspecting robots and coal mine roadways, applied in the field of robot navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
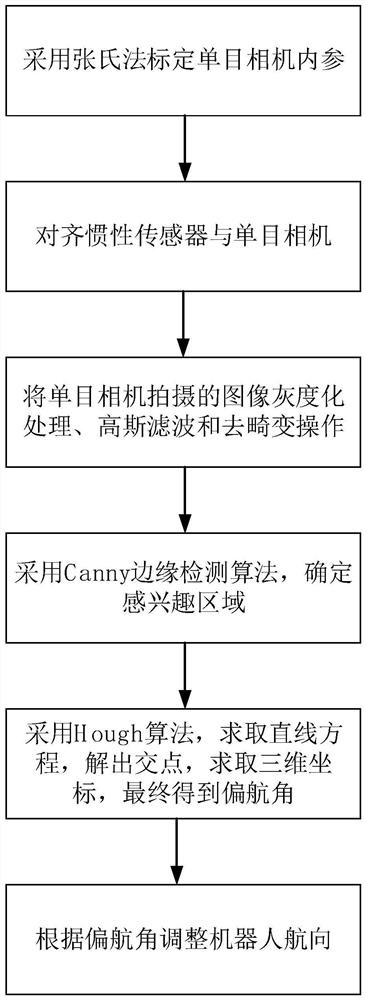
[0053] Embodiment 1: The coal mine roadway inspection fused with monocular vision and IMU of the present invention includes a robot system for inspection and a navigation method based on an inertial measurement unit (IMU) and a robot system fused with monocular vision.
[0054] The robot system used for inspection includes: monocular camera, inspection robot, airborne inertial measurement unit, airborne processor and lighting; the inspection robot carrier is used to carry onboard processor, lighting and other equipment to form a navigation The hardware part of the system; the monocular camera is used to take high-definition pictures of the coal mine underground roadway, which constitutes the data acquisition part of the system; the airborne inertial measurement unit integrates the monocular camera to obtain scale information after alignment; the lighting lamp is used for lighting inside the roadway, Improve the imaging quality of the monocular camera; the onboard processor is u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com