

Multi-maneuvering-target Doppler radar tracking method based on Gaussian mixture probability hypothesis density filtering
A Gaussian mixed probability and Doppler radar technology, applied in the field of Doppler radar tracking of multiple maneuvering targets, can solve problems such as inconsistency between motion and motion modeling, maneuvering, and missing targets
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
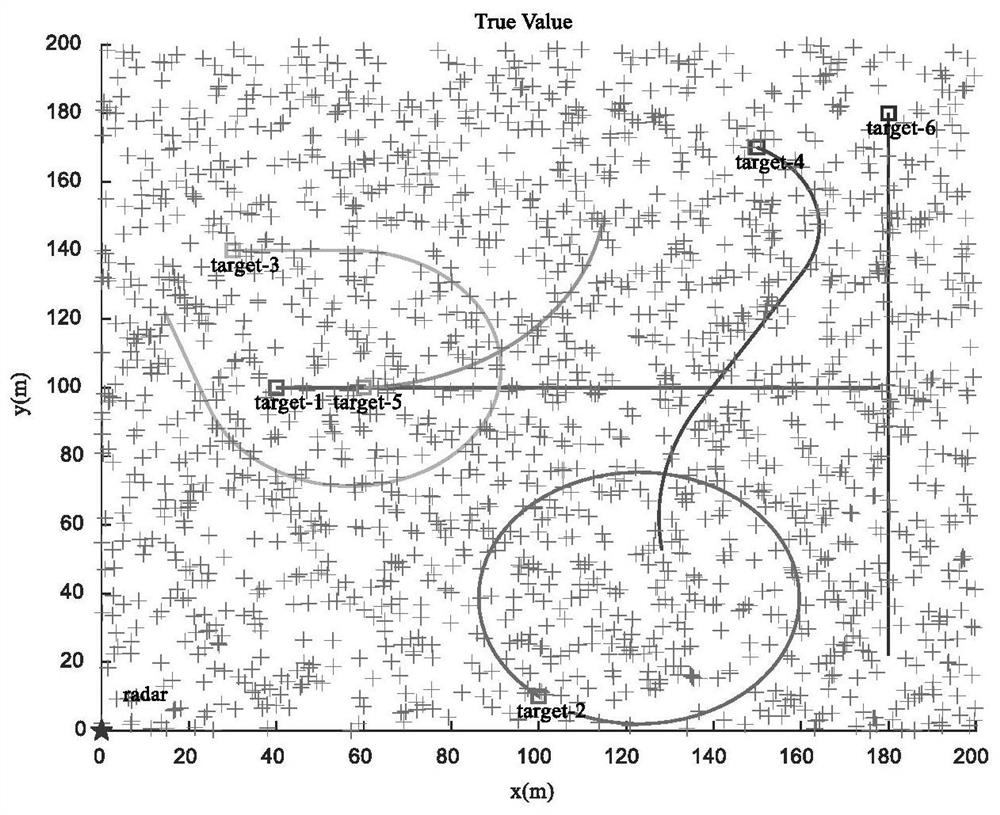
[0226] Consider the case of tracking six different maneuvering targets in a two-dimensional plane:
[0227] The model set in the simulation includes a uniform linear motion (CV) model, a uniform left turn (CTL) model, and a uniform right turn (CTR) model. The model probability transition matrix is
[0228]
[0229] The radar detection area is [0,300m]×[0,300m], and the clutter is uniformly distributed in the environment, and the number is expected to be 20 in each scanning period. The scanning time of the radar is 1s, the detection probability of the radar is 0.99, and the survival probability of the target is 0.99. The standard deviation of radar distance measurement error is 3m, the standard deviation of azimuth measurement error is 0.05°, the standard deviation of radial velocity measurement error is 0.15m / s, and the standard deviation of pseudo measurement error is 8m 2 / s, the correlation coefficient between radial velocity and radial distance measurement error is 0.9...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More