Unmanned sweeper and long-distance welt sweeping method thereof
A technology for unmanned driving and cleaning vehicles, which is applied in the direction of motor vehicles, vehicle position/route/height control, non-electric variable control, etc. Affect cleaning quality and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
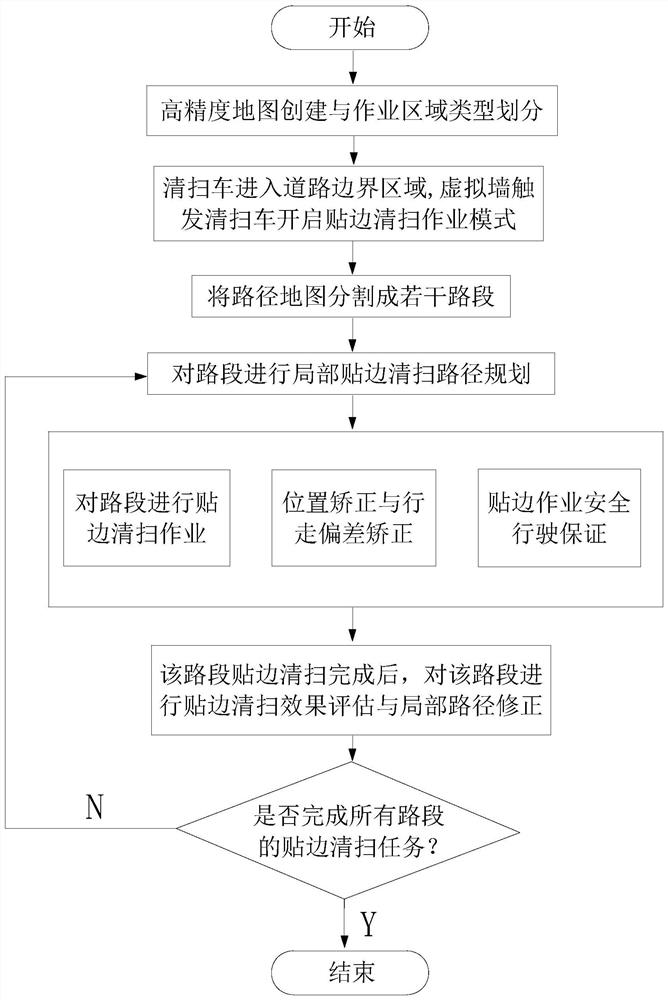
[0053] A long-distance welt cleaning method for an unmanned sweeping vehicle, comprising the following steps:
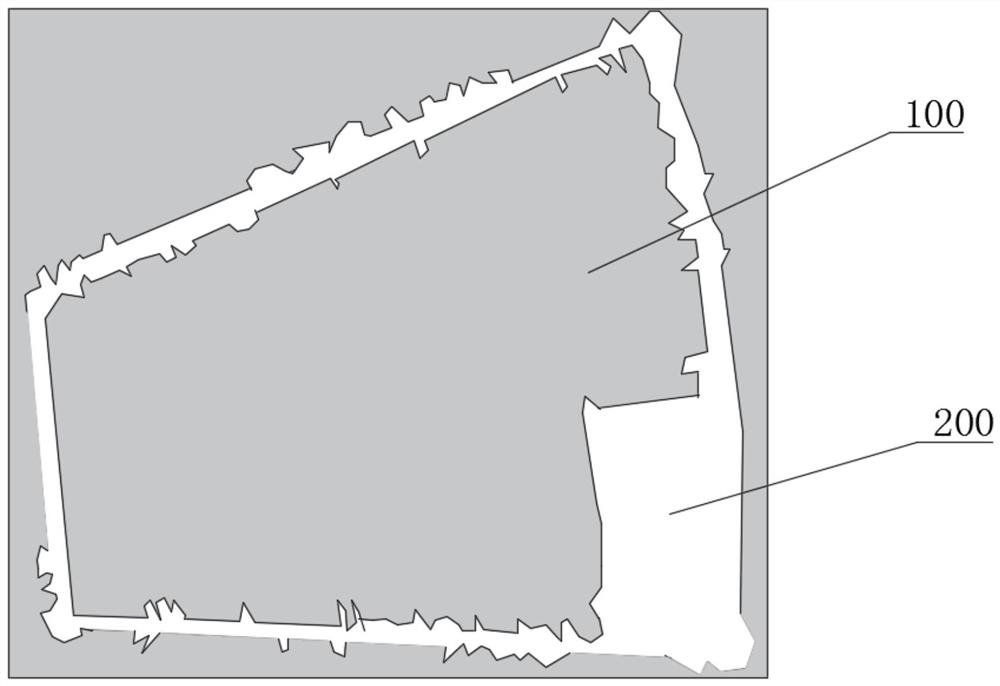
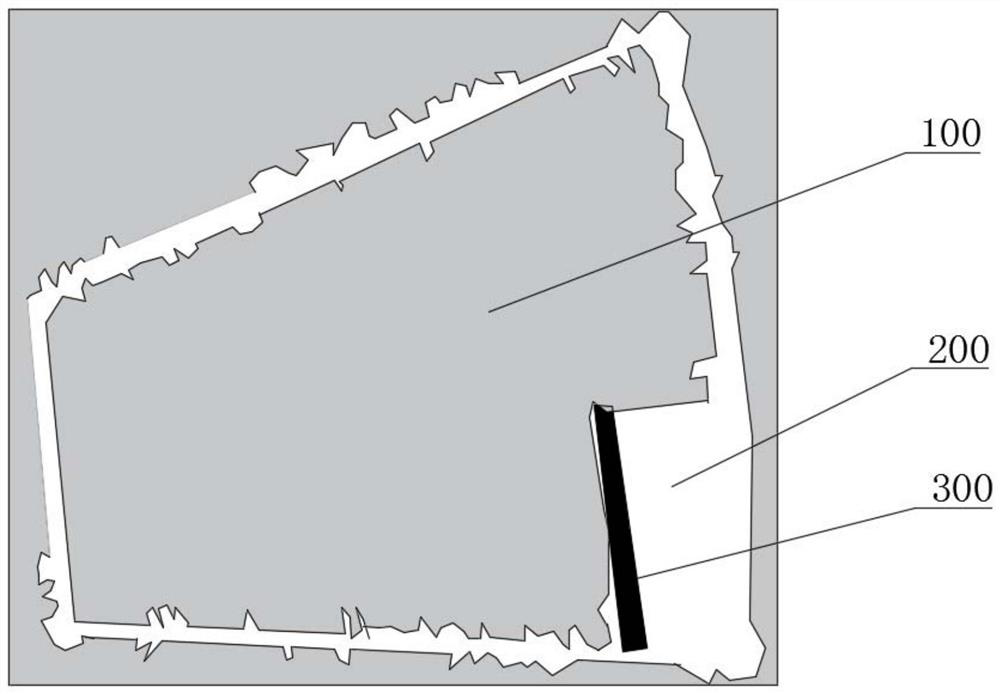
[0054] S1. High-precision map creation and operation area type division: through the sensor module, create a high-precision map of the unmanned sweeper operation area, and mark the features in the operation area, and use the dynamic virtual wall technology to integrate high-precision The map is divided into broad operation area, road boundary area and impassable area;
[0055] S2. Area recognition and start of edge cleaning: When the sweeper enters the road boundary area, the virtual wall technology in the high-precision map triggers the sweeper to start the edge cleaning mode, and performs edge cleaning according to the planned edge cleaning path;
[0056] S3. Position correction and walking deviation correction: During the process of side-by-side cleaning, the sweeper recognizes the features in the work area, and uses sensors such as laser radar and binocular visio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More