Mobile robot path planning method and system based on improved RRT algorithm
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A mobile robot, path planning technology, applied in the direction of control/regulation system, instrument, non-electric variable control, etc.
Pending Publication Date: 2020-10-09
INSPUR SOFTWARE CO LTD
View PDF5 Cites 9 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0005] The technical task of the present invention is to provide a mobile robot path planning method and system based on the improved RRT algorithm to solve the problem of how to plan a better path for mobile robots in various environments based on the RRT algorithm
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0101] The mobile robot path planning method based on the improved RRT algorithm of the present invention, the method is to add a convergence factor on the basis of the RRT algorithm to improve the selection of the growth point and the exploration point of the extended tree, so as to achieve the purpose of improving the convergence speed of the algorithm; The length adjustment is used to avoid the local minimum value of the extended tree during path planning; then the planned mobile robot path is smoothed so that the path length becomes shorter and tends to the optimal path; the details are as follows:
[0102] S1. Adding convergence factor: The classic RRT algorithm samples in many places that have no exploration value, and the expansion method is average, the real-time performance is poor, and the path quality is not high. After analysis, it is found that the root cause of the above defects of the RRT algorithm is that the random points are randomly generated in the whole spa...
Embodiment 2
[0152] The mobile robot path planning system based on the improved RRT algorithm of the present invention, the system includes,
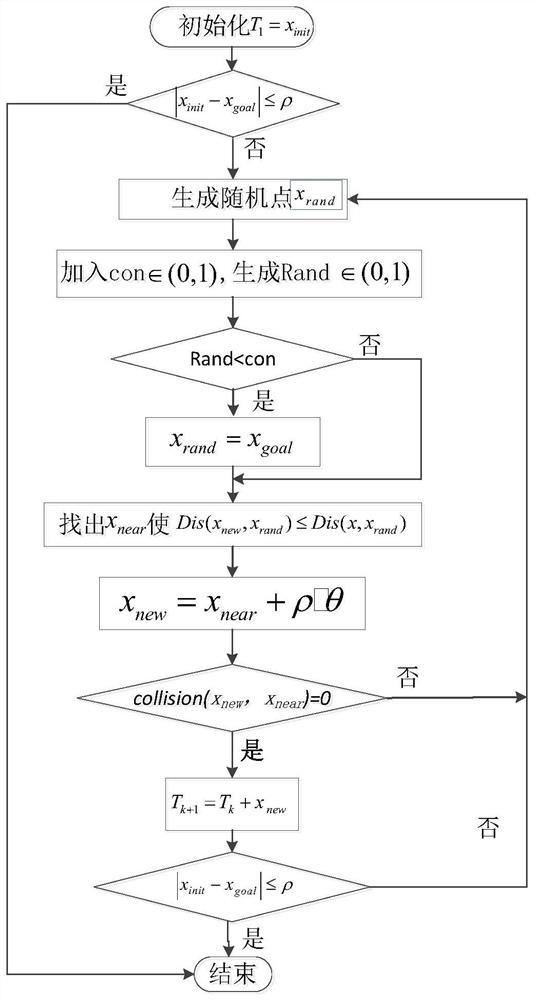
[0153] The convergence factor addition unit is used to add the convergence factor on the basis of the RRT algorithm to improve the selection of the growth point and the exploration point of the expansion tree, so as to improve the convergence speed of the algorithm; the convergence factor addition unit is to add the convergence factor con to the sampling strategy ; The specific working process is as follows:
[0155] (2), judge whether |x init -x goal |≤ρ: where, x goal Indicates the target point;
[0156] ①, if yes, jump to step (12);
[0157] ②, if not, then perform step (3) in the next step;
[0158] (3), generate a random point x rand ;
[0159] (4), given a convergence factor parameter con, con∈(0,1), generate a random number rand, rand∈(0,1);
[0160]...
Embodiment 3
[0189] An embodiment of the present invention also provides an electronic device, including: a memory and at least one processor;
[0190] Wherein, the memory stores computer-executable instructions;
[0191] The at least one processor executes the computer-executed instructions stored in the memory, so that the at least one processor executes the mobile robot path planning method based on the improved RRT algorithm as in any embodiment.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a mobile robot path planning method and system based on an improved RRT algorithm, which belongs to the field of robot moving path planning. In order to solve the technical problem of how to plan a better path of the mobile robot in various environments based on the RRT algorithm, the adopted technical scheme is as follows: a convergence factor is added on the basis of theRRT algorithm to improve the selection of growth points and exploration points of an extension tree, so that the aim of improving the convergence speed of the algorithm is fulfilled; then, dynamic step length adjustment is used for avoiding the situation that a local minimum value occurs when the extension tree carries out path planning; smoothingprocessing is carried out on the planned mobile robot path, so that the path length is shortened to tend to the optimal path; and the method specifically comprises the steps of S1 adding a convergence factor; S2 avoiding the local minimum value; andS3 carrying out smoothingprocessing. The system comprises a convergence factor adding unit, a local minimum value avoiding unit and a smoothingprocessing unit.
Description
technical field [0001] The invention relates to the field of path planning for mobile robots, in particular to a path planning method and system for mobile robots based on an improved RRT algorithm. Background technique [0002] Path planning for mobile robots is a very important problem in the study of robots. A mobile robot has a comprehensive system for obtaining environmental information, performing real-time planning and controlling execution behavior. It can complete every task by detecting the working environment and moving autonomously. the most active areas of research. There are various moving paths of mobile robots, and it is a difficult problem in this field to plan a better path for mobile robots in various environments. [0003] RRT (Rapidly-exploring Random Tree) algorithm, the RRT algorithm has low requirements on the environment, that is, it does not need to pre-process the environment, and the algorithm has a fast search speed, and has been widely used to...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.




 Login to View More
Login to View More  Login to View More
Login to View More