Spirally propelled pipeline inner wall cleaning and crack detecting and repairing robot
A crack detection and screw propulsion technology, applied in the direction of special pipes, pipe components, mechanical equipment, etc., can solve the problems of difficult observation of pipe space and access to cleaning operations, etc., and achieve the effect of improving repair efficiency, simple structure, and simplified repair process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
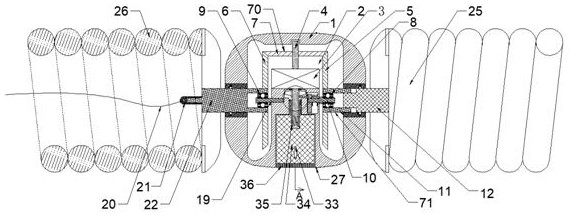
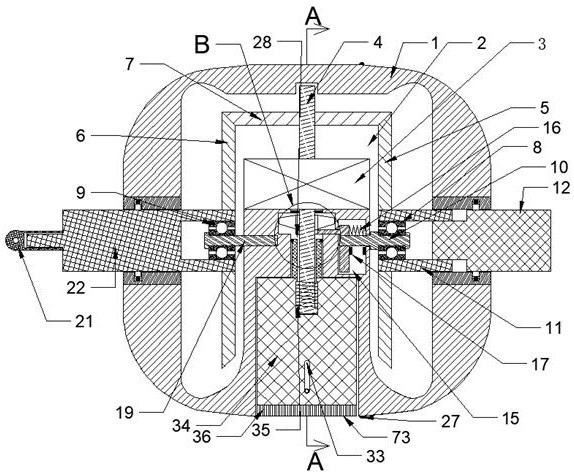
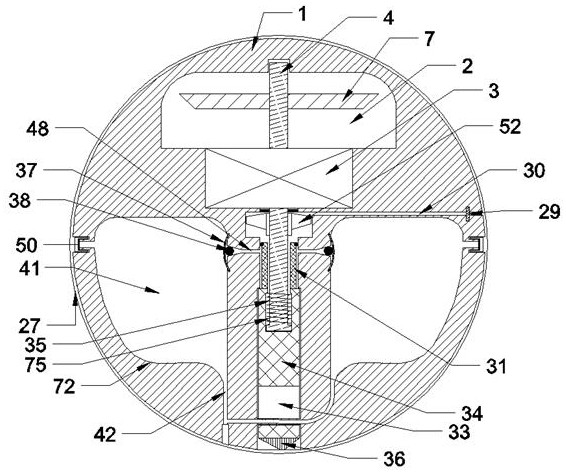
[0018] Combine below Figure 1-5 The present invention is described in detail, wherein, for the convenience of description, the orientations mentioned below are defined as follows: figure 1 The up, down, left, right, front and back directions of the projection relationship itself are the same.
[0019] combined with Figure 1-5 The robot for cleaning the inner wall of the pipeline and detecting and repairing cracks by spiral propulsion includes a head 25, a main casing 1 and a tail 26, the head 25 has a forward spiral structure, and the tail 26 has a reverse spiral structure; The inside of the main casing 1 is provided with a transmission chamber 2, and the transmission chamber 2 is provided with a driving mechanism 70 for providing power for the head 25 and the tail 26. The control mechanism 71 for the operation of the head 25, the storage mechanism 72 for glue output is also provided in the main casing 1, and the moving mechanism 73 for applying glue is also provided in th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com