Multi-information-source high-precision direct positioning method based on unmanned aerial vehicle mobile monitoring
A positioning method and mobile monitoring technology, applied in positioning, radio wave measurement systems, measurement devices, etc., can solve the problems of limited positioning accuracy, relying on additional information matching steps, etc., to improve positioning accuracy, reduce fusion errors, avoid The effect of secondary loss
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] now combined with Figures 1 to 5 The present invention is described in further detail.
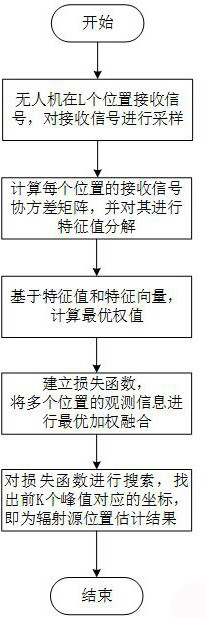
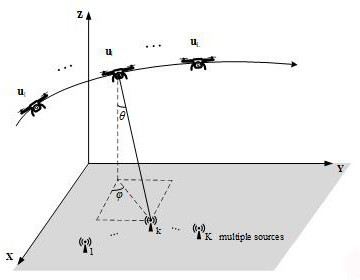
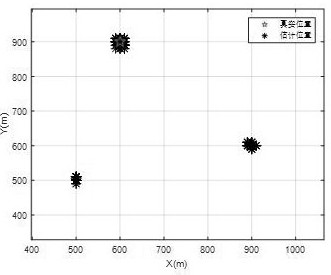
[0035] Such as figure 1 As shown, a multi-source high-precision direct positioning method based on UAV mobile monitoring, the UAV receives multiple radiation source signals at L different positions, and samples the received signals; calculate each The covariance matrix of the received signal at the position is decomposed into eigenvalues; based on the eigenvalues and corresponding eigenvectors obtained from the eigenvalue decomposition, the optimal weight of each observation position is determined; The loss function is established by intersection, and the weighted fusion of the noise subspace projection results of the steering vector to L observation positions is obtained, and the radiation source position estimation result is obtained by searching. The specific implementation is as follows:
[0036] Step 1: The UAV receives multiple radiation source signals at L different loc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More