

Novel multi-degree-of-freedom rigid thick plate paper cutting crawling robot
A technology of crawling robots and degrees of freedom, applied in the field of folding robots, can solve problems such as complex motion forms, complex structures, and small folding-expanding ratios of origami crawling robots, and achieve light and simple structure, stable folding-expanding, folding-expanding ratio and reliable movement sex-enhancing effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
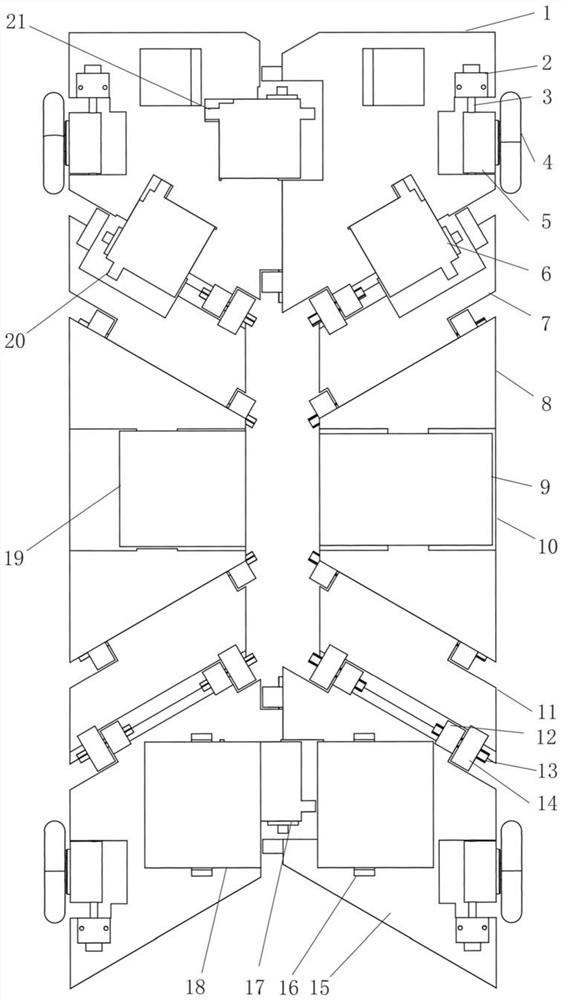
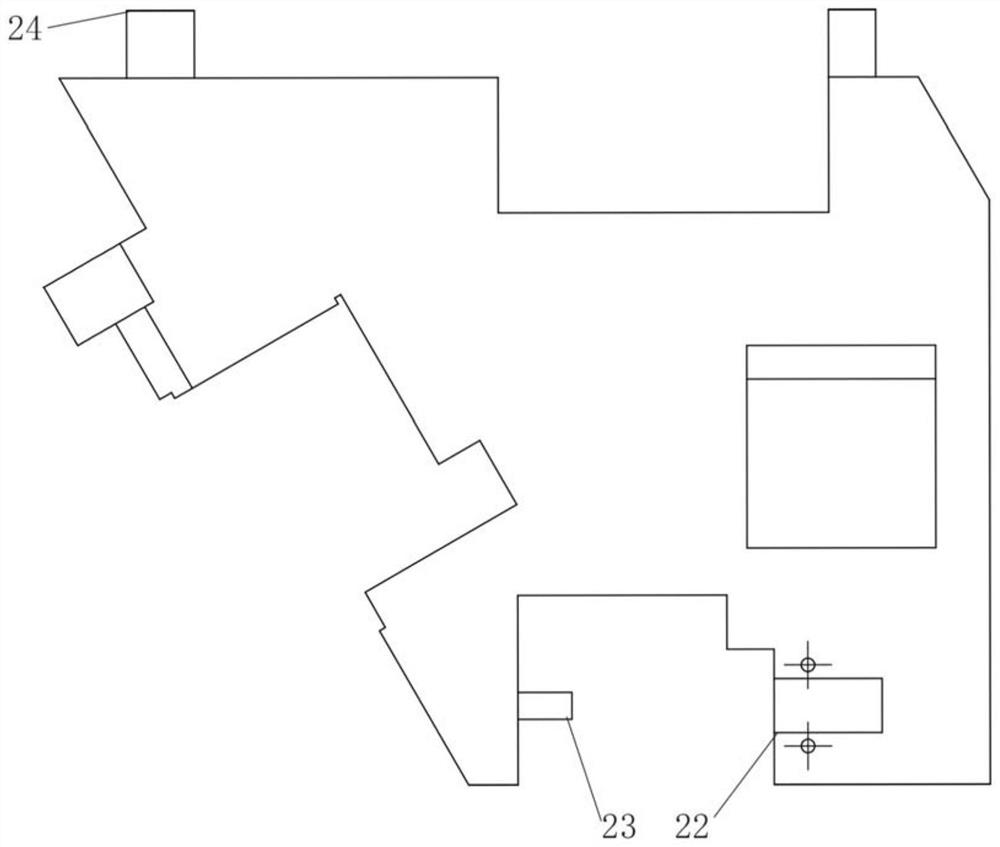
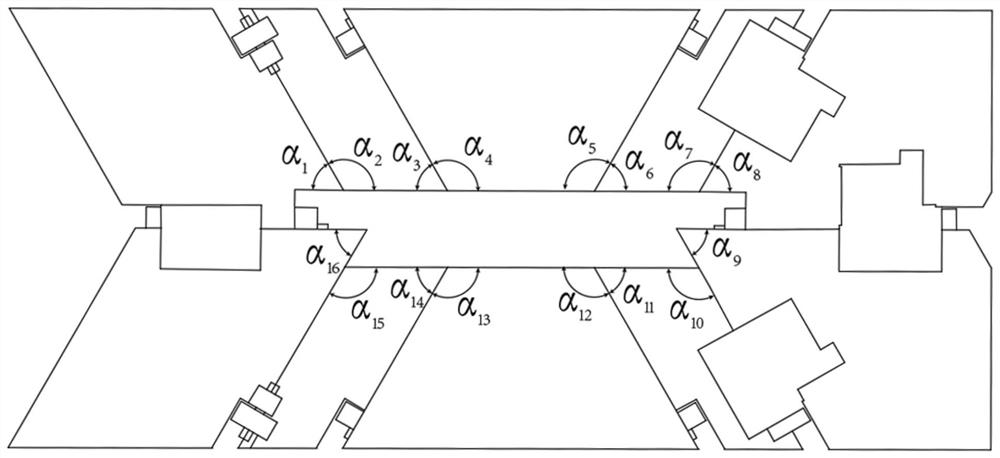
[0019] Such as Figure 1-6 As shown, the new multi-degree-of-freedom rigid thick plate paper-cut crawling robot is composed of 10 plates. Except for a slit in the middle, the rest of the plates are connected at the creases through joints, and the joints can be seen according to the difference between the peak and valley creases. , respectively arranged below and above the connection, the position of the connecting pin is the same as the position of the peak and valley creases in the thick board paper-cutting, and they are respectively located on the upper surface and the lower surface of the board to realize the folding and unfolding of the robot. It is composed of the first The midd...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More