Mobile robot path planning method based on improved genetic algorithm
An improved genetic algorithm and mobile robot technology, applied in the field of mobile robot path planning based on improved genetic algorithm, can solve problems such as local optimum, slow convergence speed, failure to reach the target point, poor optimization stability, etc., to speed up the convergence speed, Reduce the number of turns and increase the effect of population diversity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
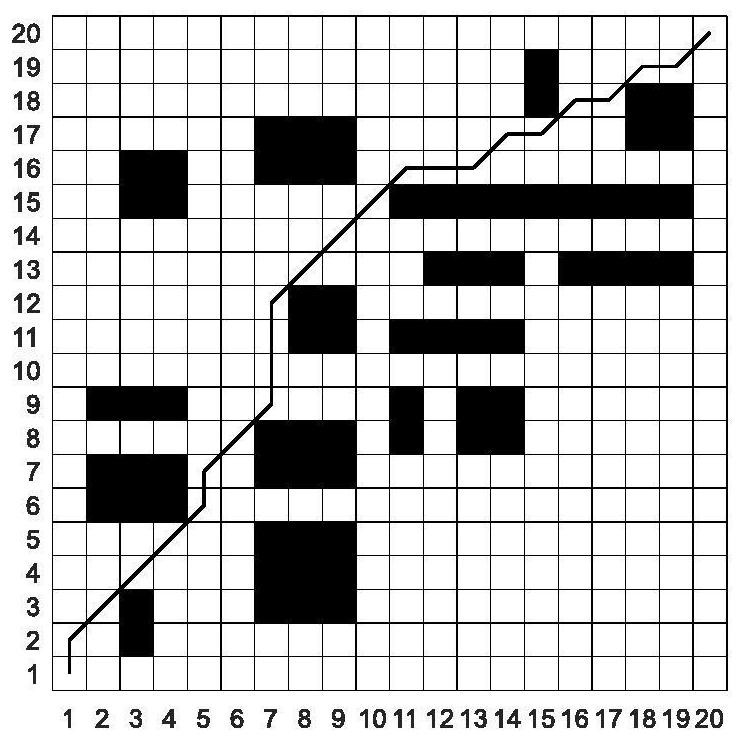
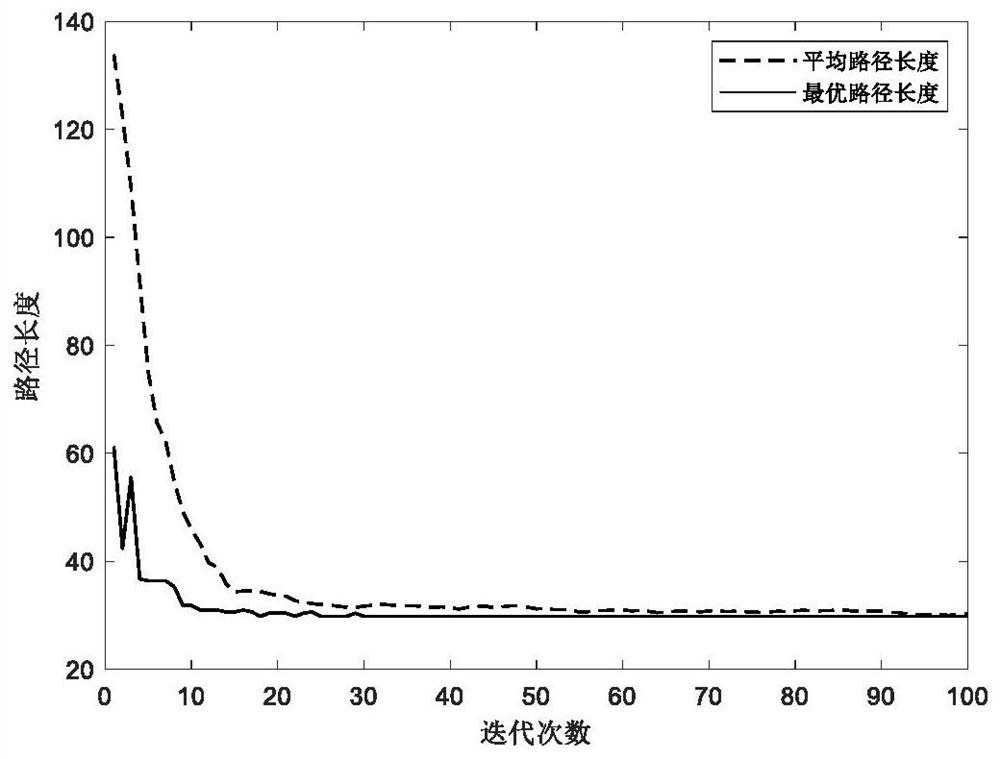
[0043] The specific embodiment of the present invention will be further described in detail in conjunction with the accompanying drawings. In order that those skilled in the art can better understand the implementation of the present invention, the present invention also provides the simulation verification results of robot path planning using Matlab2018a software.
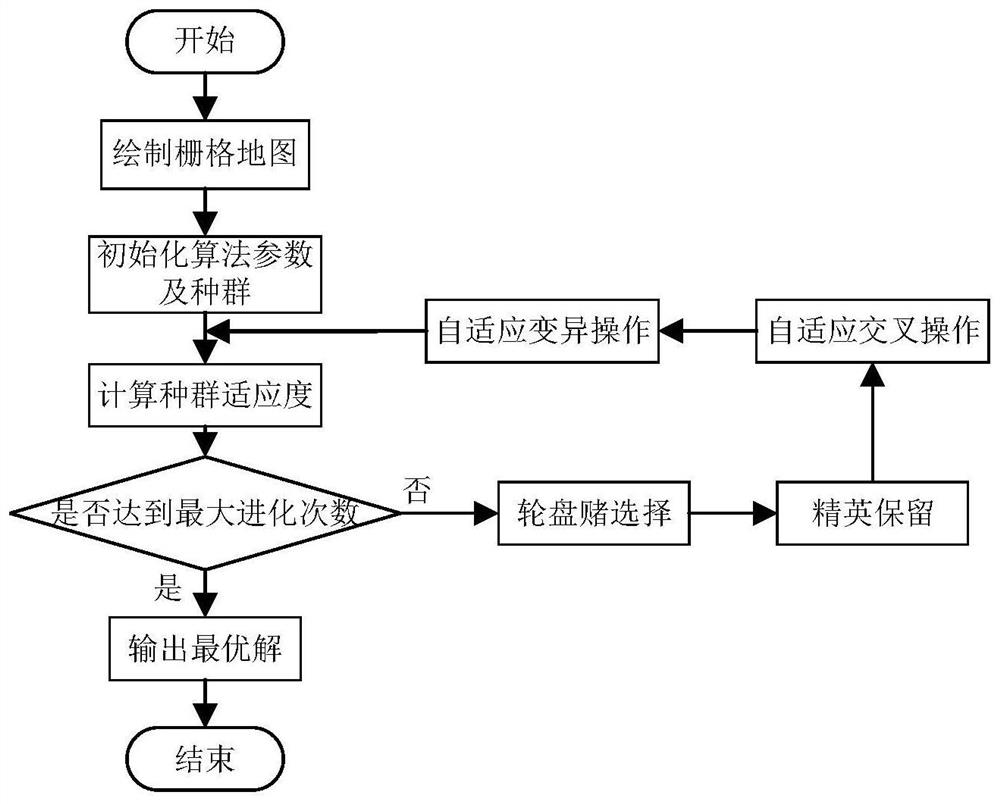
[0044] A method for path planning of a mobile robot based on an improved genetic algorithm proposed by the present invention is as follows: figure 1 shown, including the following steps:
[0045] Step 1: Use the grid method to model the environment of the robot workspace;
[0046] Step 2: Initialize algorithm parameters and population;
[0047] Step 3: Calculate the population fitness value. In step 3, the present application adds a smoothness function with a penalty term to the fitness function, which reduces the number of turns of the robot to a certain extent and improves the safety of the robot at the same ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More