UAV attitude estimation method and system based on three-color and four-light marker recognition
An attitude estimation and aircraft attitude technology, applied in the field of unmanned aerial vehicles, can solve problems such as low stability, achieve the effect of improving stability, reducing recognition difficulty, and realizing automatic real-time attitude estimation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
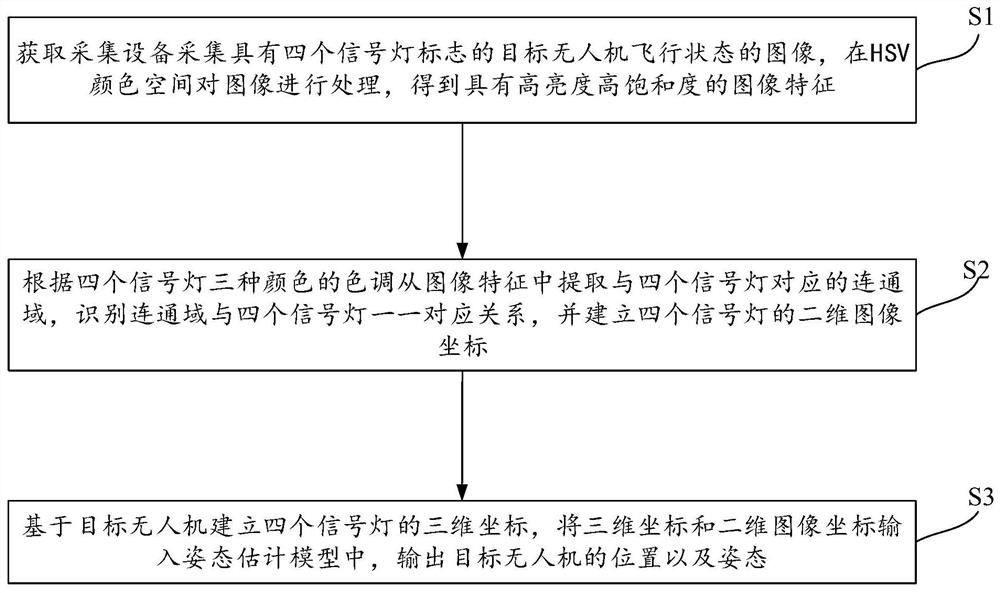
[0064] figure 1 It is a flow chart of the steps of the UAV pose estimation method based on three-color and four-light marker recognition described in the embodiment of the present invention.
[0065] Such as figure 1 As shown, the embodiment of the present invention provides a UAV attitude estimation method based on three-color and four-light marker recognition. The tip of the wing and tail of the target UAV is provided with four signal lights for marking, and the four signal lights With three colors, the UAV pose estimation method based on three-color four-light marker recognition includes the following steps:
[0066] Step S1. Acquiring the acquisition device to collect the image of the flight state of the target drone with four signal lights, and processing the image in the HSV color space to obtain image features with high brightness and high saturation;
[0067] Step S2. Extract the connected domains corresponding to the four signal lamps from the image features accordi...
Embodiment 2
[0124] image 3 It is a frame diagram of the UAV attitude estimation system based on three-color four-light marker recognition described in the embodiment of the present invention.
[0125] Such as image 3 As shown, the embodiment of the present invention also provides a UAV attitude estimation system based on three-color and four-light marker recognition. The tip of the wing and tail of the target UAV is provided with four signal lights for marking, based on the three-color The unmanned aerial vehicle posture estimation system of four-light mark recognition comprises feature detection unit 10, feature recognition unit 20 and posture analysis and estimation unit 30;
[0126] The feature detection unit 10 is used to obtain the image of the target UAV flight state collected by the acquisition device with four signal lamp signs, and process the image in the HSV color space to obtain image features with high brightness and high saturation;
[0127] The feature identification un...
Embodiment 3
[0137] The embodiment of the present invention also provides a computer-readable storage medium. The computer storage medium is used to store computer instructions. When it is run on a computer, the computer executes the above-mentioned UAV attitude estimation method based on three-color and four-light marker recognition. .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More