

Multi-machining-robot cooperation method for hardware flexible production workshop
A production workshop, hardware flexible technology, applied in the direction of instruments, comprehensive factory control, comprehensive factory control, etc., can solve various conflicts and failures in complex workshops, collisions, workshop congestion and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention is described in further detail now in conjunction with accompanying drawing.
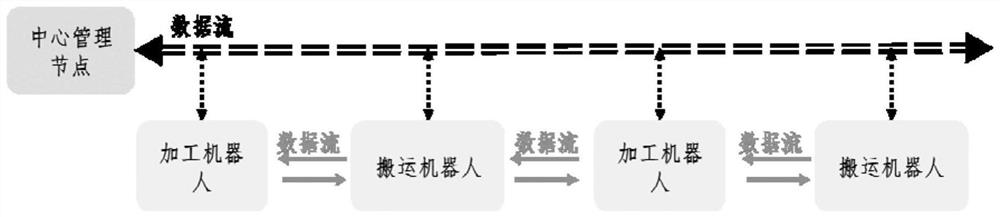
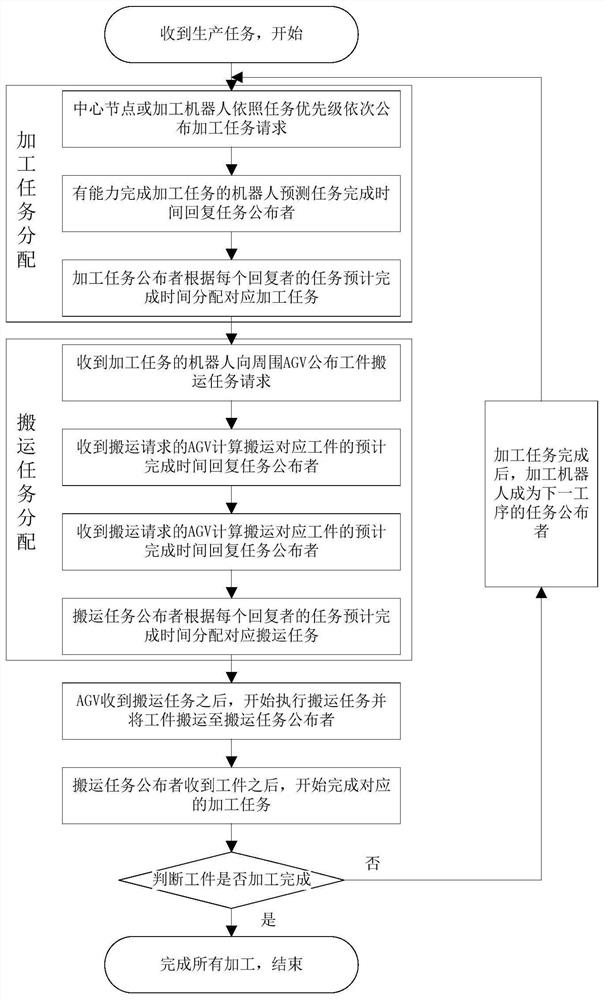
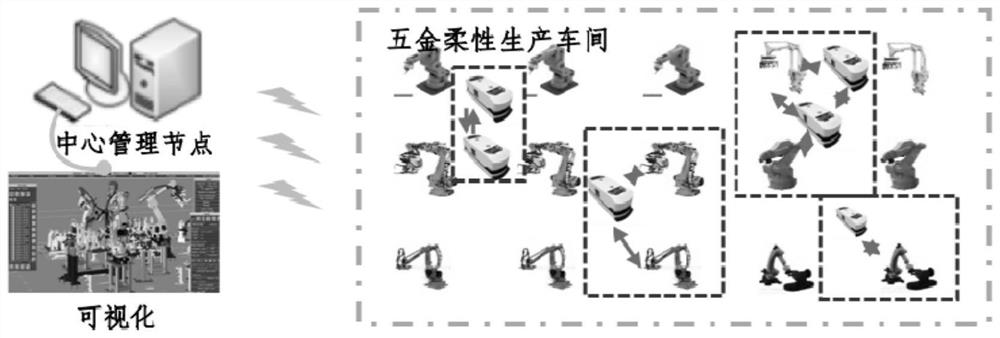
[0051] The multi-processing robot collaboration method of the hardware flexible workshop proposed by the present invention takes the processing robot as the leading initiator of the main processing tasks and handling tasks in the workshop, and realizes the rapid assignment and execution of tasks through communication and cooperation with various surrounding processing robots; comprehensive application Methods such as distributed collaboration and centralized intervention and allocation can solve various possible faults and congestion problems in the workshop, and improve the flexibility and automation level of the system. Specifically, the present invention will focus on the modular flexible production workshop including various processing robots and AGVs, and study the distributed task assignment method of the above-mentioned various processing robots. The application o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More