

Visual odometer rotational motion processing method based on pause information supplement mechanism
A visual odometry and rotational motion technology, which is applied in image data processing, computing, computer parts and other directions, and can solve the problems that visual odometry cannot directly solve the problem of degree of freedom change.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0043] This embodiment provides a visual odometer rotational motion processing method based on a pause information supplement mechanism; the specific test environment is: Intel Core i7 processor 3.6GHz, 8GB memory, Windows 10 system, which meets the normal level of computer configuration. Such as figure 1 shown, including steps:
[0044] 1. Monitor the image frame and analyze the motion category of the image frame
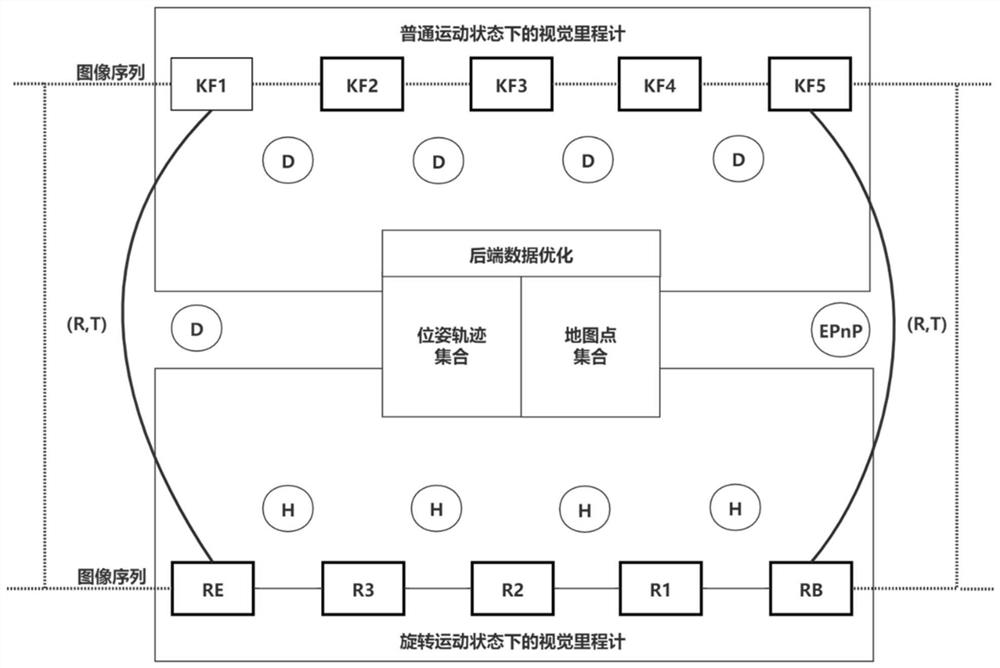
[0045] Such as figure 1 As shown, the PSIM mechanism will be turned on in real time during the operation of the SLAM system, and different PSIM steps will be started when the camera moves differently, which is the part shown in the dotted box in the figure. Judgment ba...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More