

Aerial long-distance target following shot system and method
A long-distance, target-based technology, applied in the field of target tracking, can solve problems such as image jitter, camera focus cannot be adjusted dynamically, and it is difficult to clearly capture the target's flight attitude
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
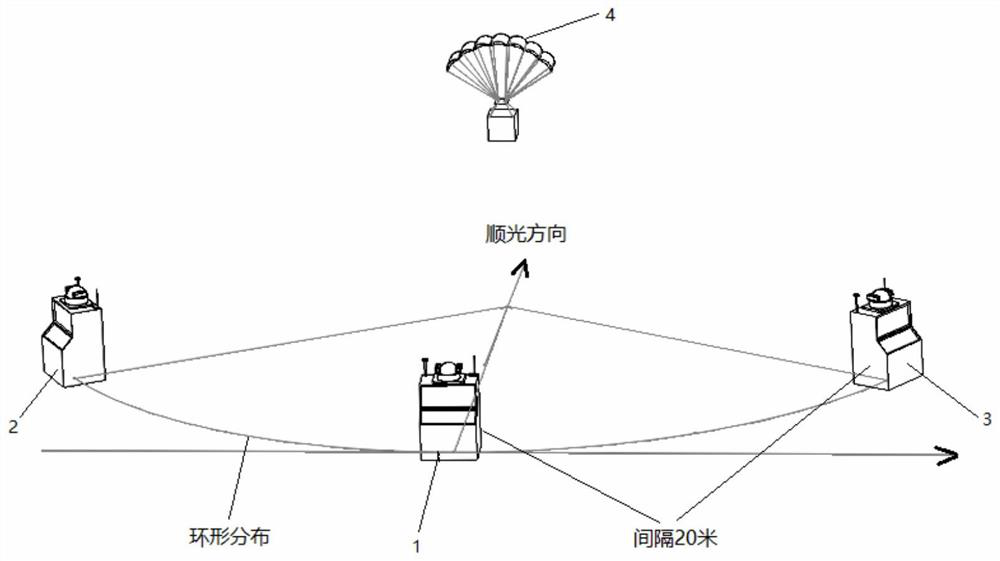
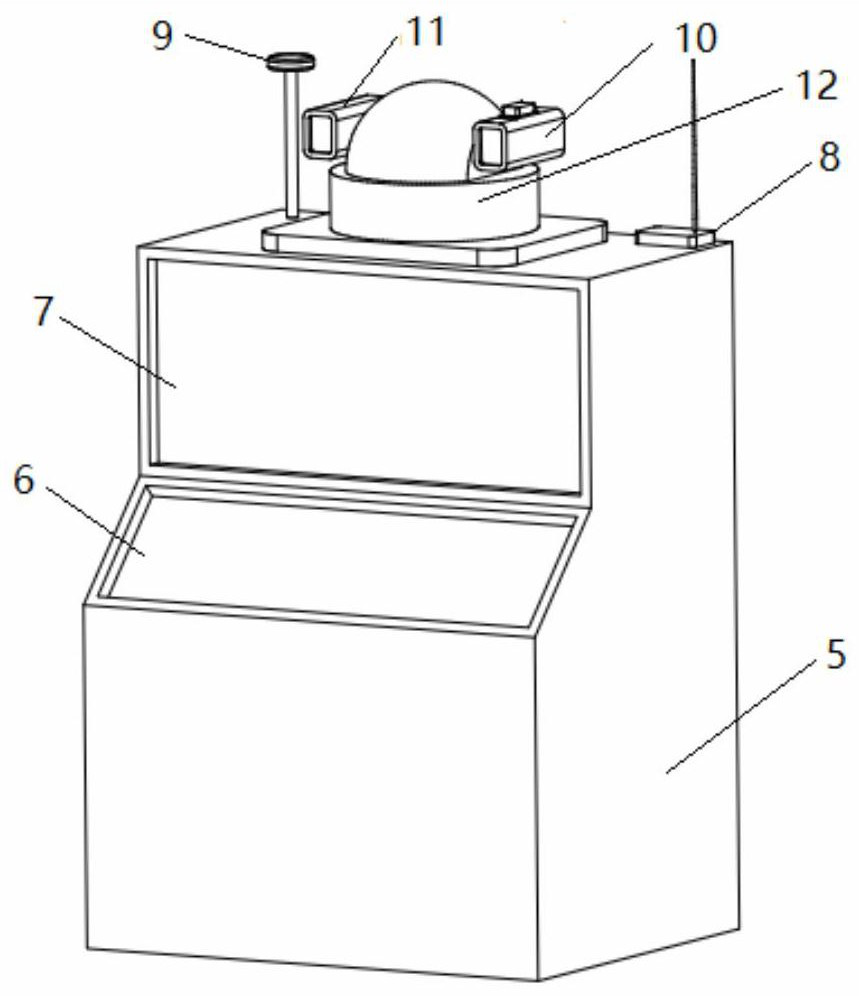
[0059] The present invention designs a long-distance target tracking system in the air, such as figure 1 As shown, there are three base stations 1, 2, and 3. The base stations face the airspace of the target 4 along the light direction, and are distributed in a ring shape, and the distance between adjacent base stations is more than 20 meters. like figure 2 As shown, each base station includes a base 5 and an industrial computer 6 and a display screen 7 arranged in the base, and the top of the base 5 is provided with a wireless communication module 8 and a GPS timing positioning module 9 respectively connected to the industrial computer 6 , a tracking camera 10, a tracking camera 11 and a cloud platform 12. The tracking camera 10 and the follow-up camera 11 are fixed side by side on the platform 12, keeping the optical axes parallel to e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More