

Gait balance training system based on six-degree-of-freedom platform
A training system and degree-of-freedom technology, which can be used in training equipment for adjusting coordination, training equipment for adjusting cardiovascular system, gymnastics equipment, etc., and can solve the problem of non-unique gait evaluation standards.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0018] The technical solution of the present invention will be described in detail and completely through the accompanying drawings and embodiments below. Apparently, the described embodiments are only some of the embodiments of the present invention, but not all of them. The gait balance training schemes completed based on equivalent software and hardware all apply to the protection category of the present invention.
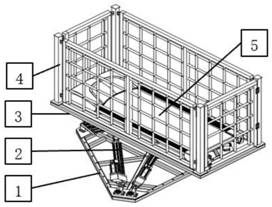
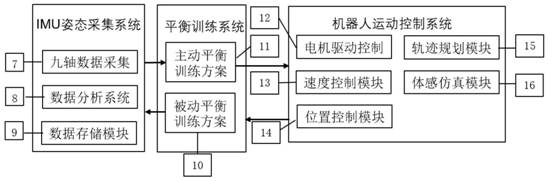
[0019] The present invention is based on related hardware such as a 6-DOF motion platform and an IMU inertial sensing acquisition node, and combines an IMU attitude acquisition system with a robot motion control system through a balance training system to realize complete gait balance training.
[0020] In the active training program 11, the human body initiates the movement, and the inertial sensor collects the node 6 to collect information such as acceleration, speed, magnetic field, etc. After the nine-axis data collection algorithm 7 and the data analysis s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More