

Hydraulic hexapod robot and walking gait control method based on mass center fluctuation
A control method and technology of hydraulic machinery, applied in the field of robotics, can solve the problems of valve port throttling loss, energy waste, low energy utilization rate, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
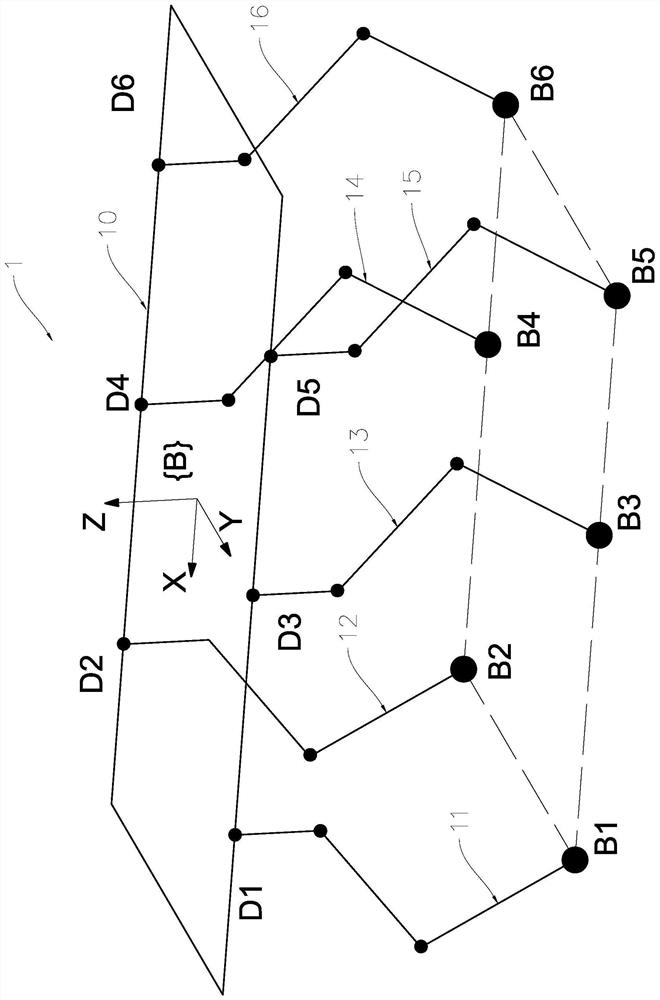
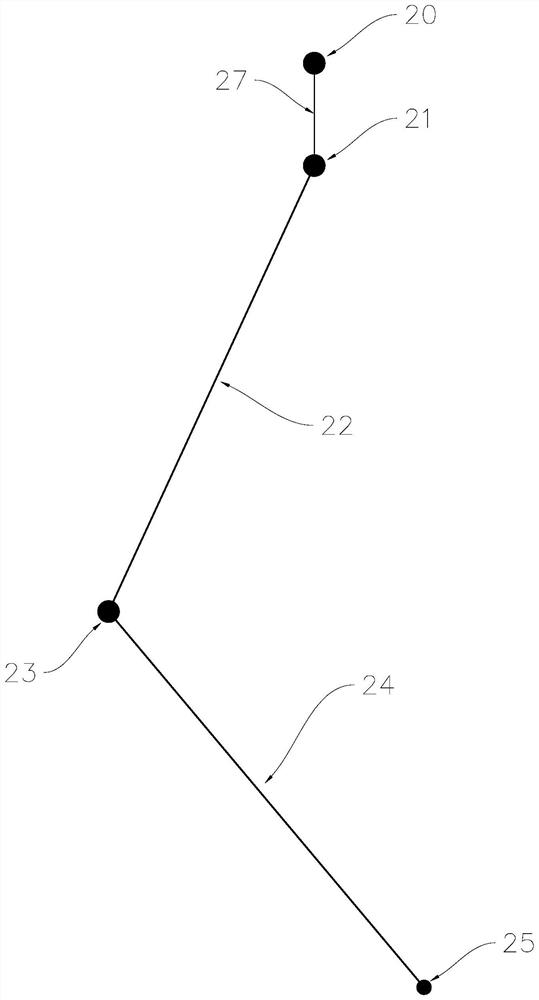
[0047] like figure 1 As shown, the hexapod walking robot 1 of the present invention includes a control unit, a body 10, a hydraulic system, a hydraulic mechanical leg 11, a hydraulic mechanical leg 12, a hydraulic mechanical leg 13, a hydraulic mechanical leg 14, a hydraulic mechanical leg 15 and a hydraulic mechanical leg 16, Three hydraulic mechanical legs are respectively arranged on both sides of the body 10, and the hydraulic mechanical legs on both sides are arranged symmetrically; Twice the area of the hydraulic cylinder of the mechanical leg, that is, the hydraulic cylinder area of the hydraulic mechanical leg 13 and the hydraulic mechanical leg 14 is twice the area of the hydraulic cylinder of other hydraulic mechanical legs; wherein, the structure of the hydraulic mechanical leg is as follows figure 2 As shown, the specific root joint 20, root joint rod 27, hip joint 21, thigh rod 22, knee joint 23, calf rod 24 and foot end 25 fixed on the calf rod 24; the hyd...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More