

Paddle leg type deformable amphibious hexapod robot
A hexapod robot, amphibious technology, applied to amphibious vehicles, motor vehicles, transportation and packaging, etc., can solve problems such as difficult to meet land obstacle surmounting and underwater propulsion requirements, redundant and complex structures, low operating efficiency, etc. Achieve strong anti-wave disturbance ability, strong environmental adaptability, and enhance the effect of stable attitude
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
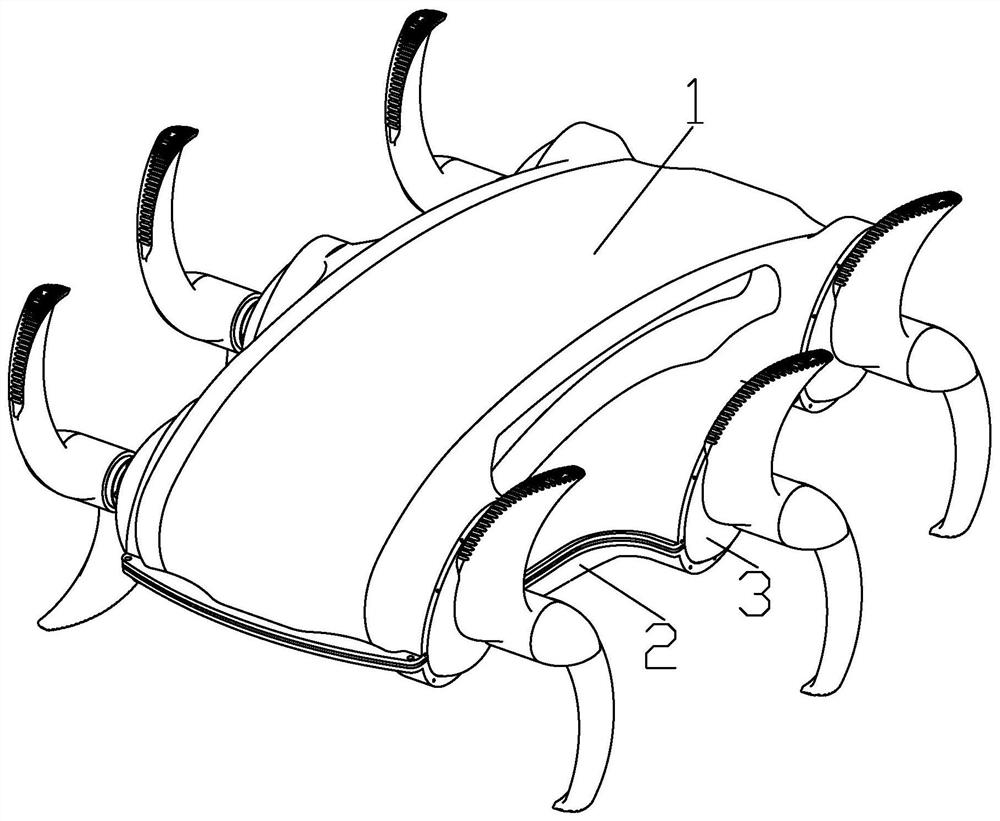
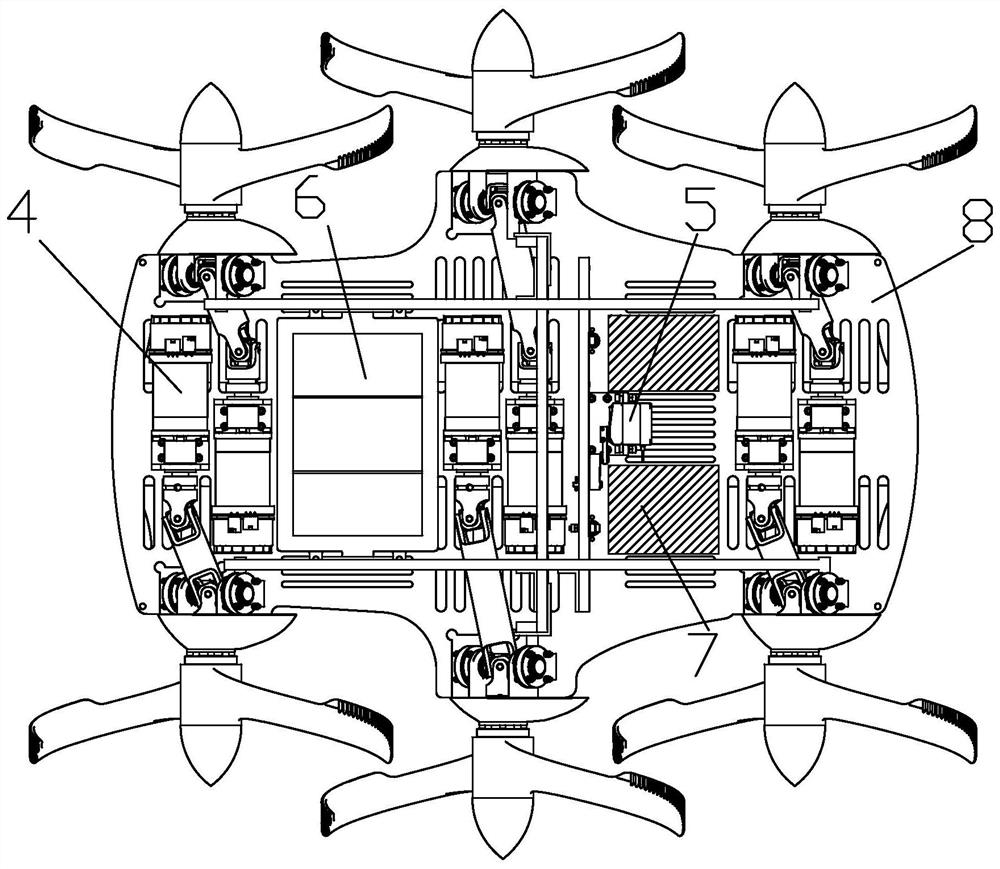
[0022] Specific implementation mode one: combine Figure 1 to Figure 13 To illustrate this embodiment, a paddle leg-type deformable amphibious hexapod robot includes an upper casing cover 1, a lower casing cover 2, a soft seal 3, three paddle leg drive modules 4, a deformation drive module 5, a battery 6, and a drive control module. System 7 and chassis 8, three paddle leg drive modules 4 are fixed on the front, middle and rear of chassis 8 by bolts, batteries 6 are installed on chassis 8 by bolts, and the paddle legs driven by batteries 6 are located in the front and middle Between the modules 4, the deformation drive module 5 is installed on the chassis 8 by bolts, and the deformation drive module 5 is located between the paddle leg drive modules 4 in the middle and the rear, and the drive control system 7 is fixed and installed on the rear of the chassis 8 by bolts The shell upper cover 1 and the shell lower cover 2 are respectively mounted on the chassis 8, and the shell u...
specific Embodiment approach 2
[0026] Specific implementation mode two: combination figure 1 This embodiment will be described. The soft seal 3 of this embodiment is a rubber waterproof gasket. Such arrangement makes it suitable for underwater work. Other compositions and connections are the same as in the first embodiment.
specific Embodiment approach 3
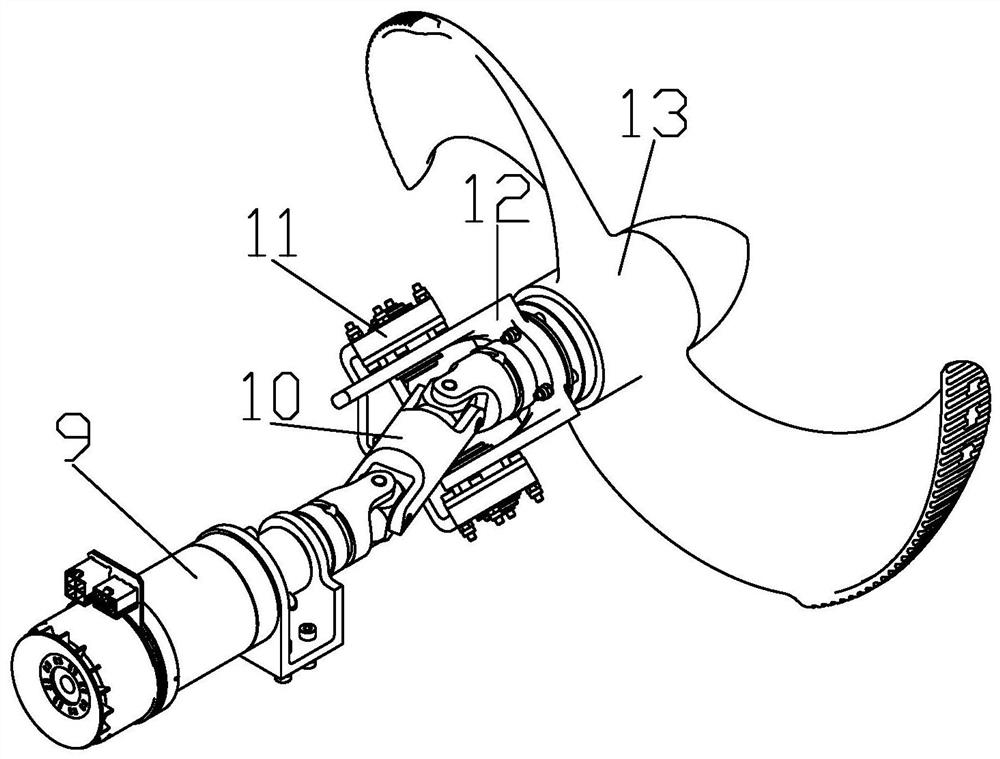
[0027] Specific implementation mode three: combination image 3Describe this embodiment, the paddle leg driving module 4 of this embodiment includes a drive motor module 9, a double joint universal coupling 10, a support 11, a swing rod 12 and a paddle leg 13, and the double joint universal joint 10 The first and last joints are respectively connected to the drive motor module 9 and the paddle leg 13 through pin circlips, the support 11 and the swing rod 12 are installed at the tail end of the double joint universal coupling 10, and the support 11 and the swing rod 12 form a revolving joint. In this way, each pair of drive motor modules is arranged staggeredly, and the first and last joints of the double-joint universal coupling are respectively connected to the drive motor module and the paddle leg, so that the drive motor module can transmit the torque to the paddle leg; land mode Below, from the horizontal plane, the axes of the first and last joints of the double-joint un...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More