

Underwater hexapod robot gait generation and conversion method based on CPG-Hopf network coupling algorithm
A hexapod robot and network coupling technology, applied in the field of foot bionic robot control, can solve the problem of excessive power and flow requirements of the hexapod robot, and achieve the effects of avoiding gait disorder, achieving stability, and achieving coordination and consistency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] specific implementation plan
[0036] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
[0037] The gait generation and switching method of the underwater hexapod robot based on the CPG-Hopf network coupling algorithm considered in this paper is aimed at the underwater hexapod robot, which needs to move in one or more gait modes during the underwater walking process. The robot has coordinated movements and stable posture during walking. In response to this requirement, the gait generation and gait conversion scheme of the underwater hexapod robot should be reasonable and optimal.
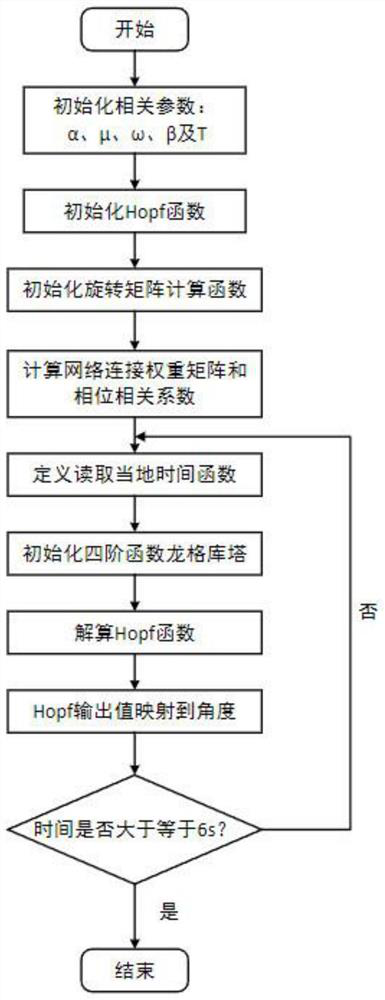
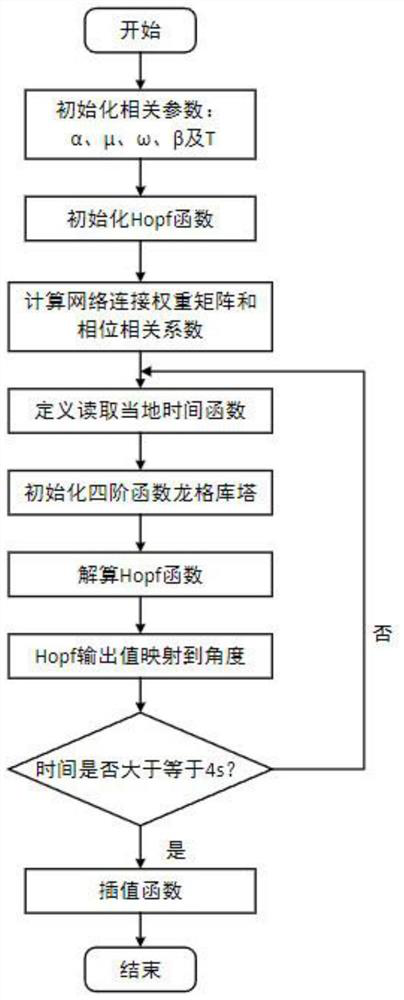
[0038] A kind of underwater hexapod robot gait generation and switching method based on CPG-Hopf network coupling algorithm proposed by the present invention comprises the following steps:
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More