

Throat swab double-arm sampling robot and sampling method based on machine vision guidance
A machine vision and robot technology, applied in the field of visual control, can solve the problems of affecting the quality of swab sampling, endangering the personal safety of medical staff, and complicated throat swab sampling.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
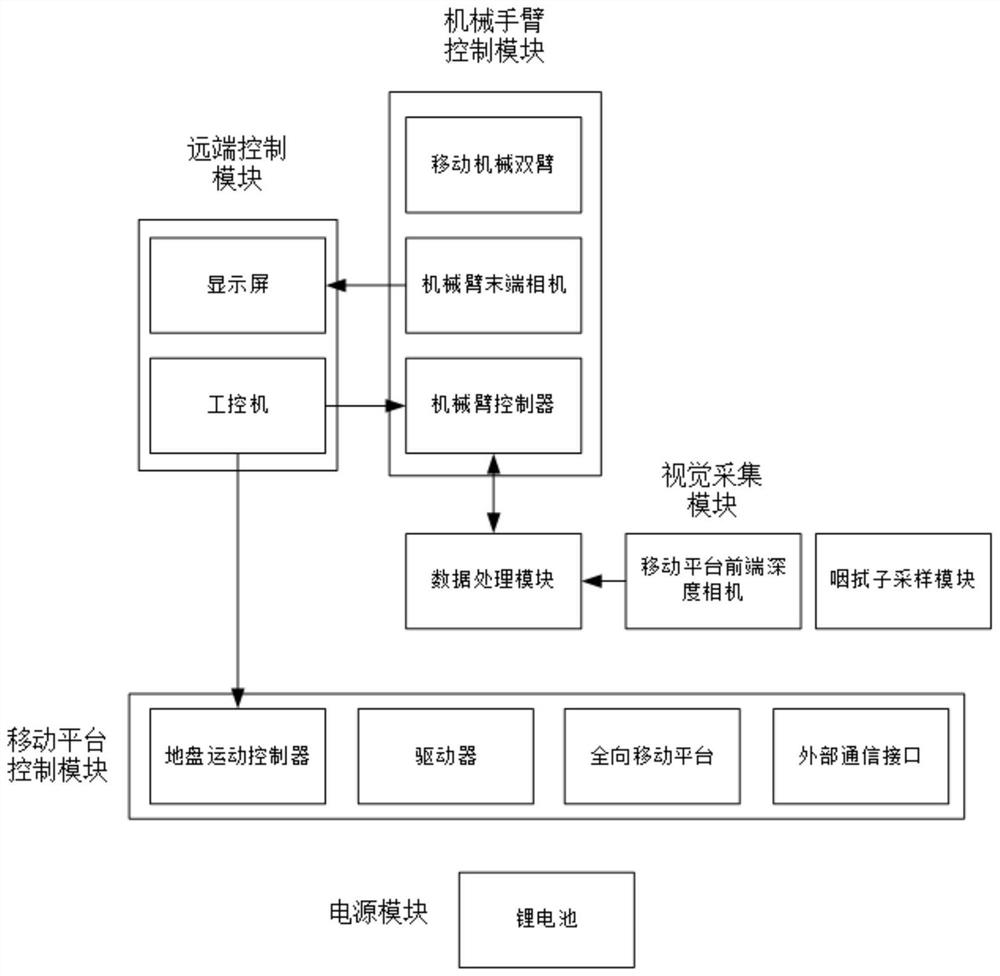
[0065] Such as figure 1 with Figure 5 As shown, a throat swab sampling dual-arm robot based on machine vision guidance includes a vision acquisition module, a mobile platform control module, a mechanical dual-arm control module, a data processing module, a remote control module, Power module and throat swab sampling module;
[0066] Wherein, the visual acquisition module, the mechanical dual-arm control module and the data processing module are all connected by network cables, the mobile platform control module and the mechanical dual-arm control module are controlled by the remote control module, and the mobile robot body is provided with dual arms. The throat swab sampling module is set on the arms of the mobile robot body, and is controlled by the mechanical arm control module, and the power supply module supplies power to the mobile robot body; ...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Arm length | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More