

Multi-body-position modular spinal cord injury rehabilitation robot mechanical structure
A rehabilitation robot and spinal cord injury technology, applied in passive exercise equipment, physical therapy, etc., can solve the problems of high participation of medical staff, large use demand, complicated operation, etc., and achieve the effect of improving space utilization and reducing vacant time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] Below in conjunction with embodiment the present invention is described in further detail:
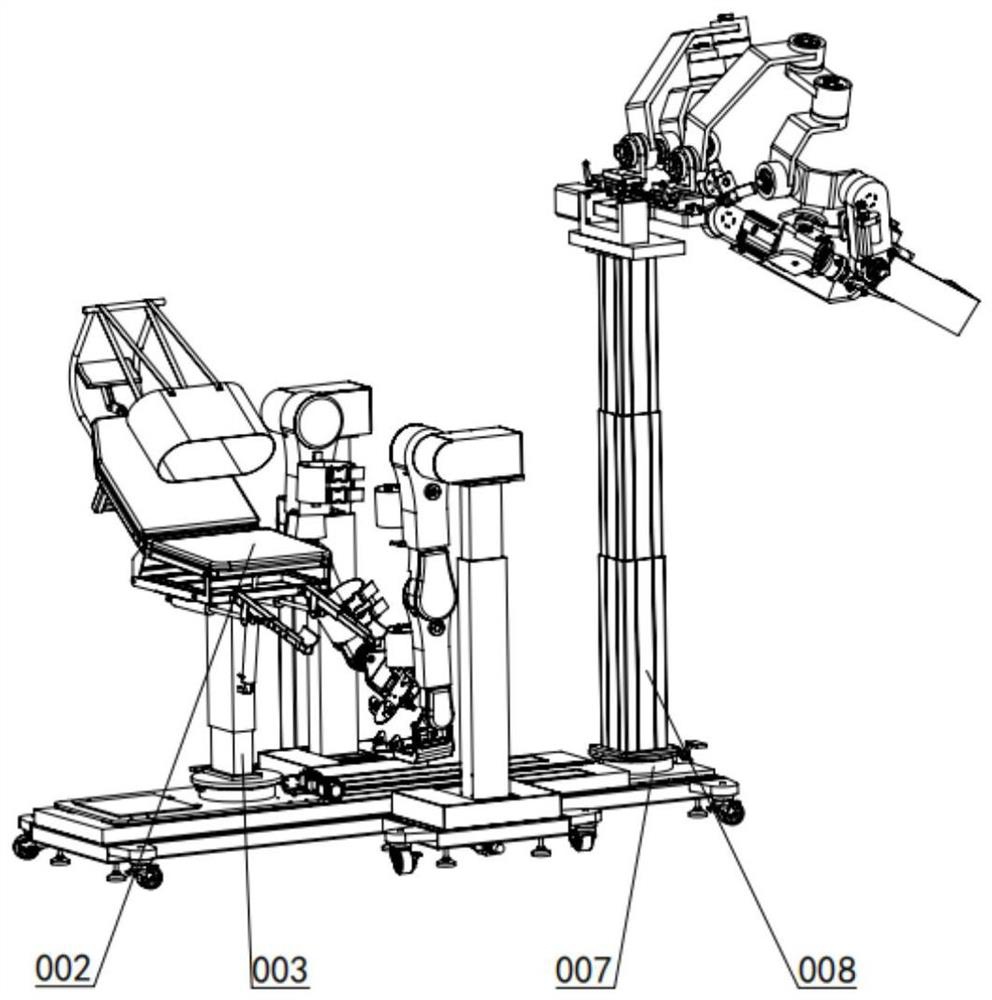
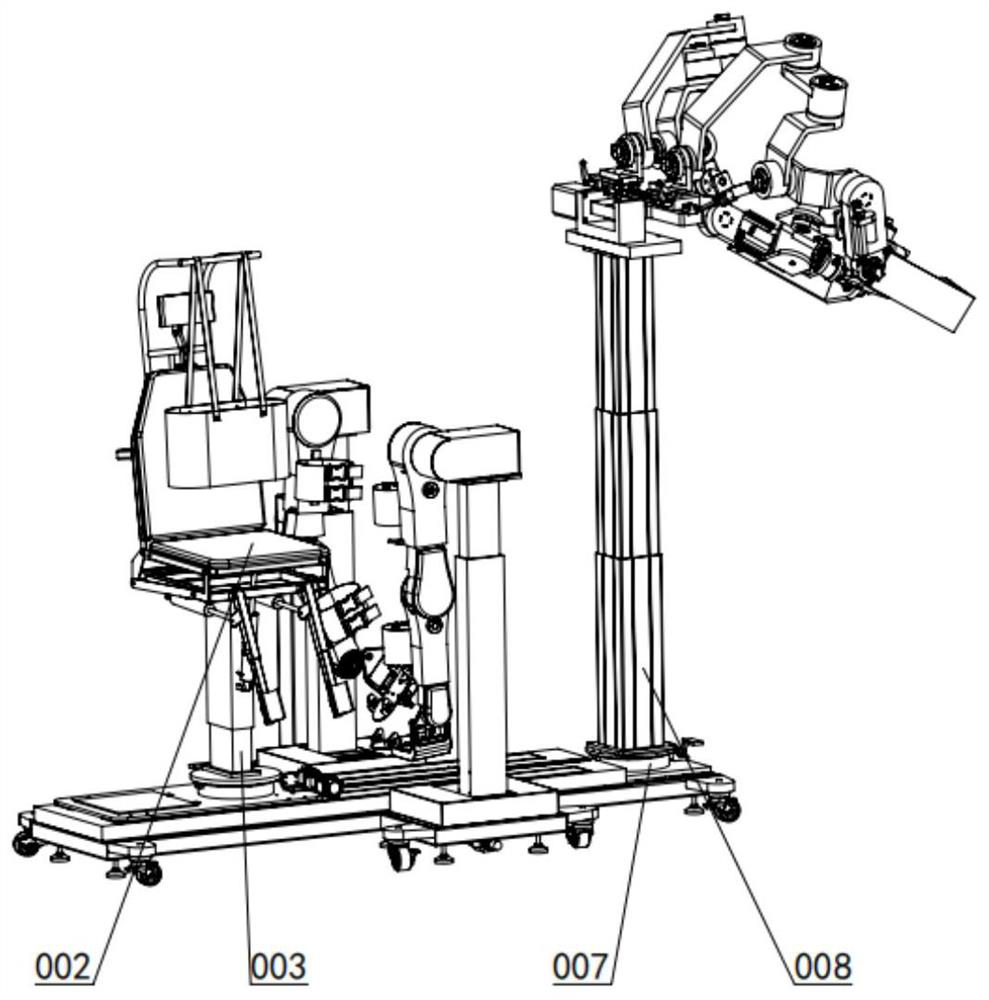
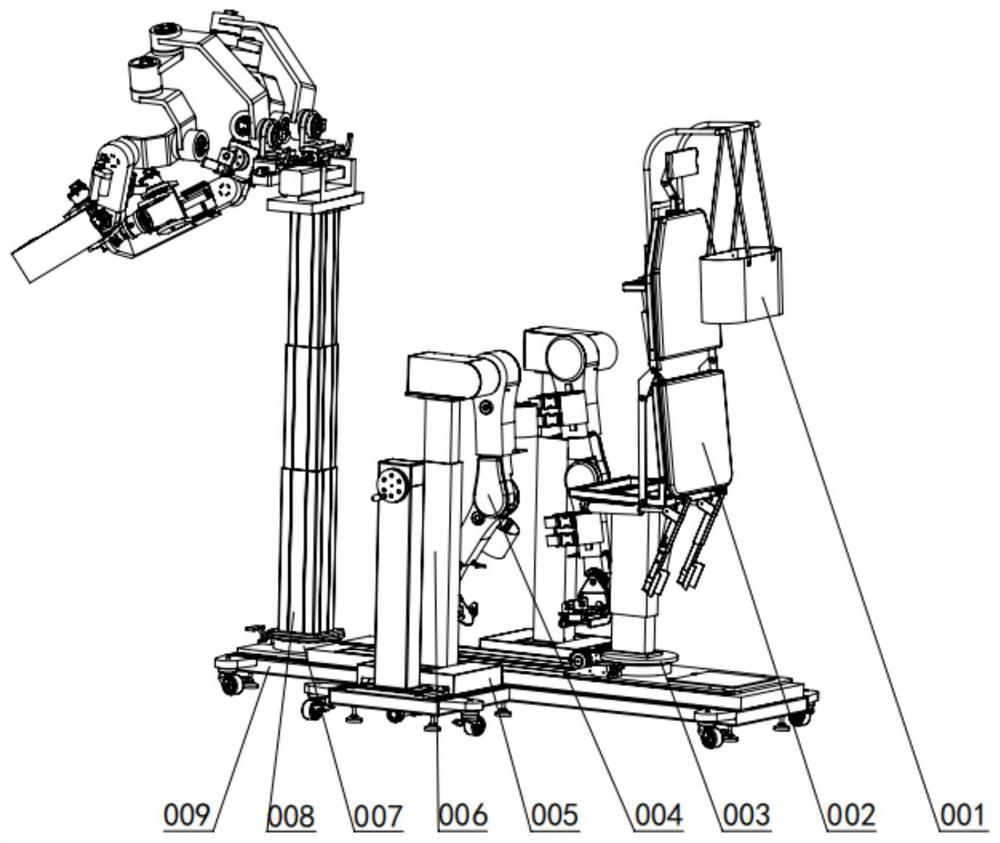
[0053] A mechanical structure of a multi-position modular spinal cord injury rehabilitation robot, including a "ten"-shaped underframe structure assembly 009, a seat base assembly 003, an upper limb rehabilitation system base assembly 007, and two left and right sides of the seat base assembly 003. A lower limb rehabilitation system base assembly 005 is detachably arranged in the shape of a "ten" above the chassis structure assembly 009, and a seat assembly 002 is arranged above the seat base assembly 003, and the seat assembly 003 can be adjusted to achieve different postures. The height adjustment, linear movement and functional rotation of the seat assembly 002, the human body weight adjustment assembly 001 is arranged behind the back of the seat assembly 002, and the upper limb rehabilitation system exoskeleton assembly 008 is arranged above the upper limb rehabilitation syst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More