

A manipulator assembly line assembly method
An assembly method and assembly line technology, which is applied in the direction of assembly machines, metal processing equipment, manufacturing tools, etc., can solve the problems of inability to assemble assembly lines with manipulators and low assembly efficiency, achieve automation and unmanned, improve assembly efficiency, The effect of good market prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
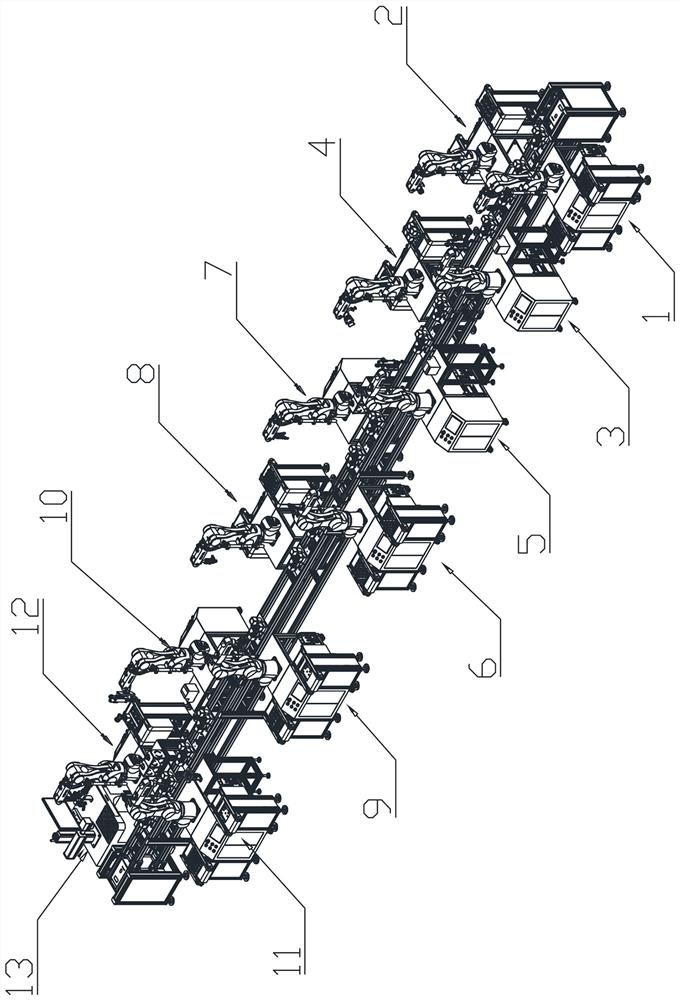
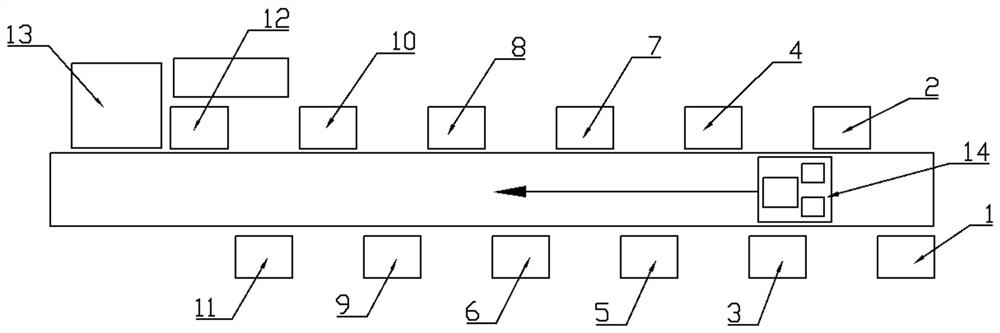
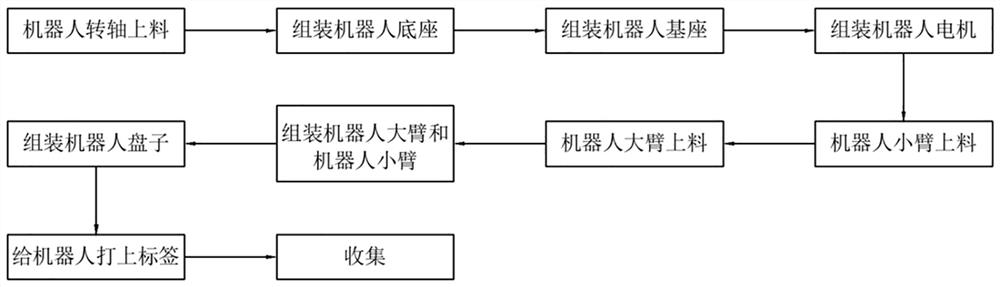
[0042] see Figure 1-Figure 18 , the manipulator assembly line method of the present invention comprises the following steps:
[0043] S1. The first transport module 1 places the manipulator rotating shaft 15-3 on the conveying platform 14 of the conveying device, and the conveying device drives the conveying platform 14 to move, and transports the manipulator rotating shaft 15-3 to the base installation station;
[0044] S2. The second handling module 2 located at the base installation station transports the manipulator base 15-2 to the conveying platform 14 located at the base installation station; then, the first assembly module 3 transports the manipulator base 15-2 -2 Assemble with the manipulator rotating shaft 15-3; after the assembly is completed, the conveying ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More