

Armed rotor wing drone attitude control method aiming at centroid shift and base floating
A multi-rotor unmanned aerial vehicle and unmanned rotor technology, which is applied in attitude control, non-electric variable control, control/regulation system, etc., can solve the problems of poor accuracy and rapidity, aircraft dynamics stability and accuracy, Without considering the center of mass offset interference and other issues, it achieves the effect of increasing stability and quick response ability, comprehensive stability and operation error analysis, and wide engineering applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] Taking a general-purpose rotor UAV flight system with multi-degree-of-freedom manipulator as an example to illustrate the specific implementation of the system and method, the flying manipulator has high requirements for attitude control accuracy and stability during the hovering work phase;
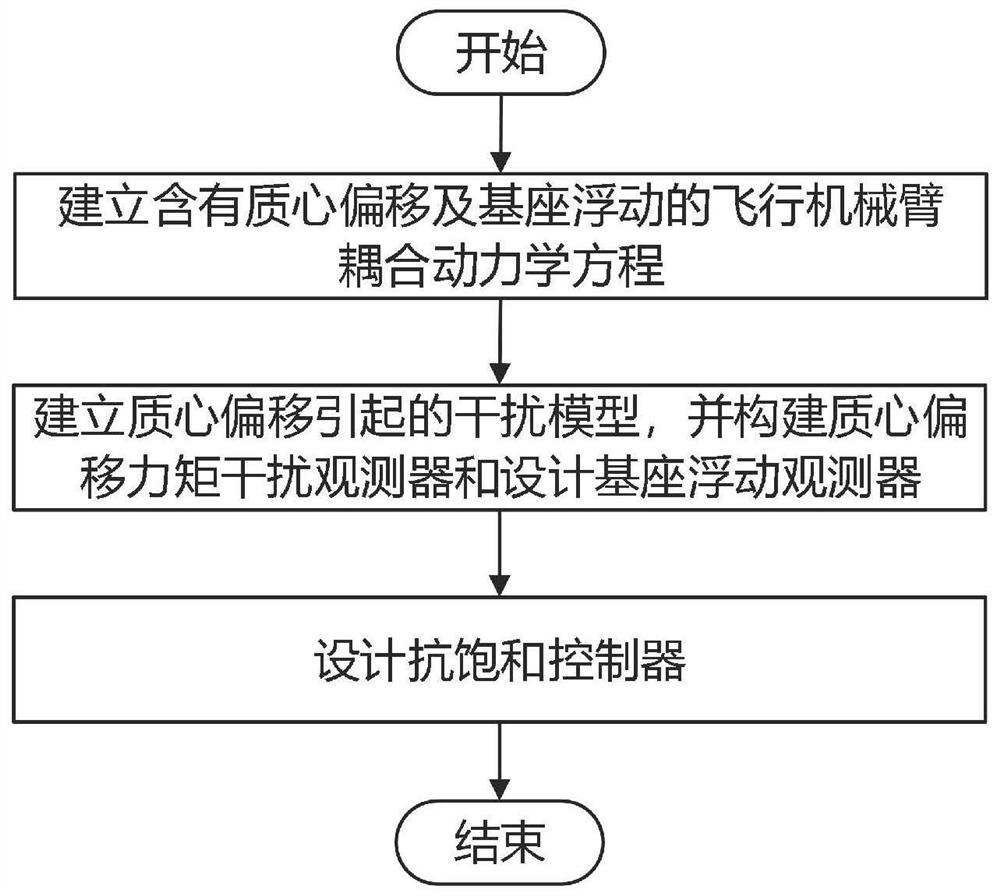
[0049] Such as figure 2 Shown, the specific implementation steps of the present invention are as follows:
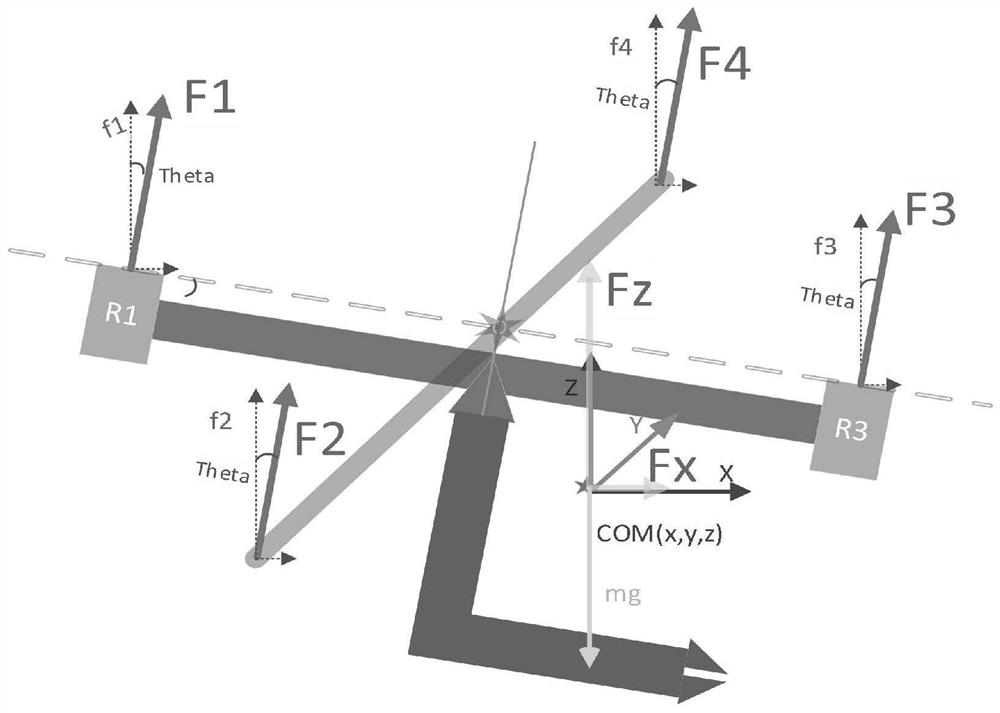
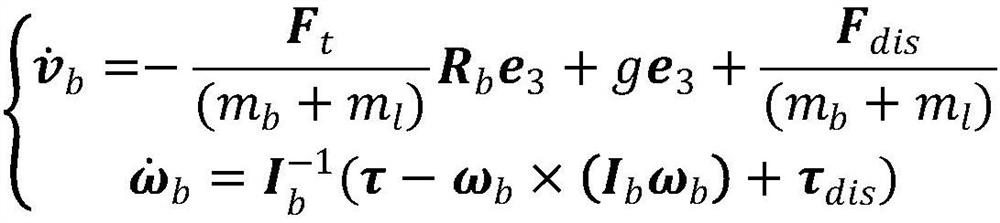
[0050] 1. Aiming at the common center of mass offset and base floating characteristics of the rotor flying manipulator, and considering the dynamic equations of the rotor UAV and the multi-degree-of-freedom manipulator, the dynamic model of the rotor flying manipulator is established, expressed as follows:
[0051]
[0052] In the formula, v b Indicates the translational velocity of the rotor UAV as the base of the manipulator, m b and m l are the masses of the multi-rotor UAV and the manipulator, respectively; F t is the total thrust of the multi-rotor UAV, R b is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More