Hybrid path planning method for indoor mobile robot
A mobile robot and hybrid path technology, applied in the fields of artificial intelligence and robot navigation, can solve problems such as lack of real-time obstacle avoidance capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
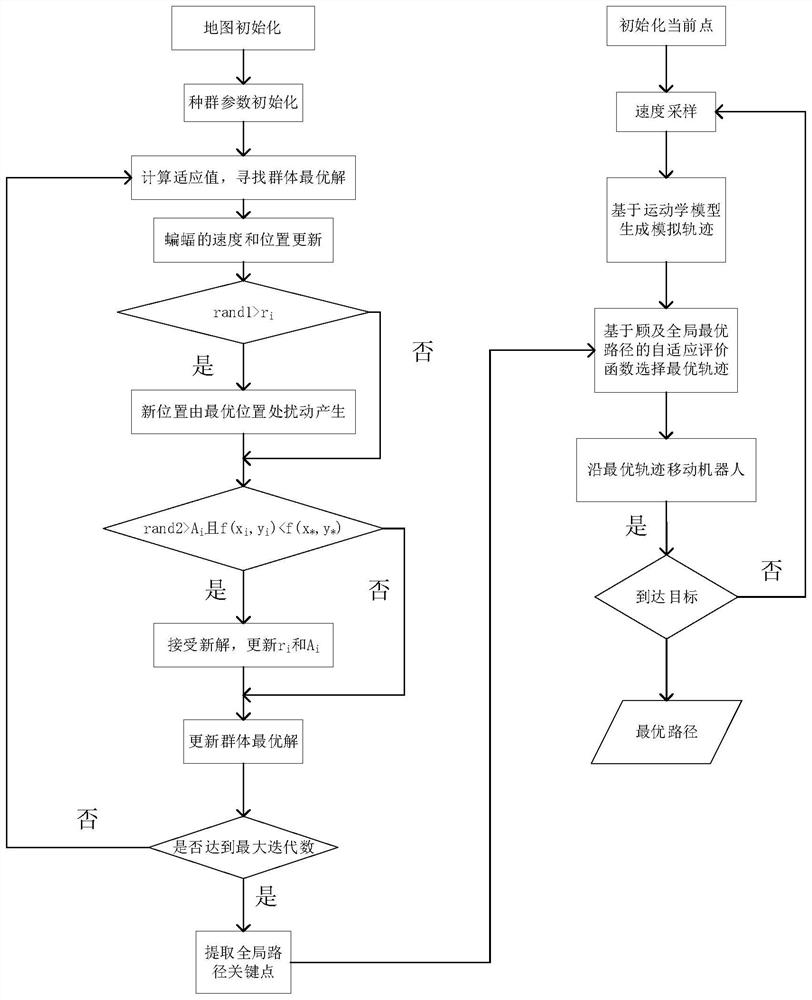
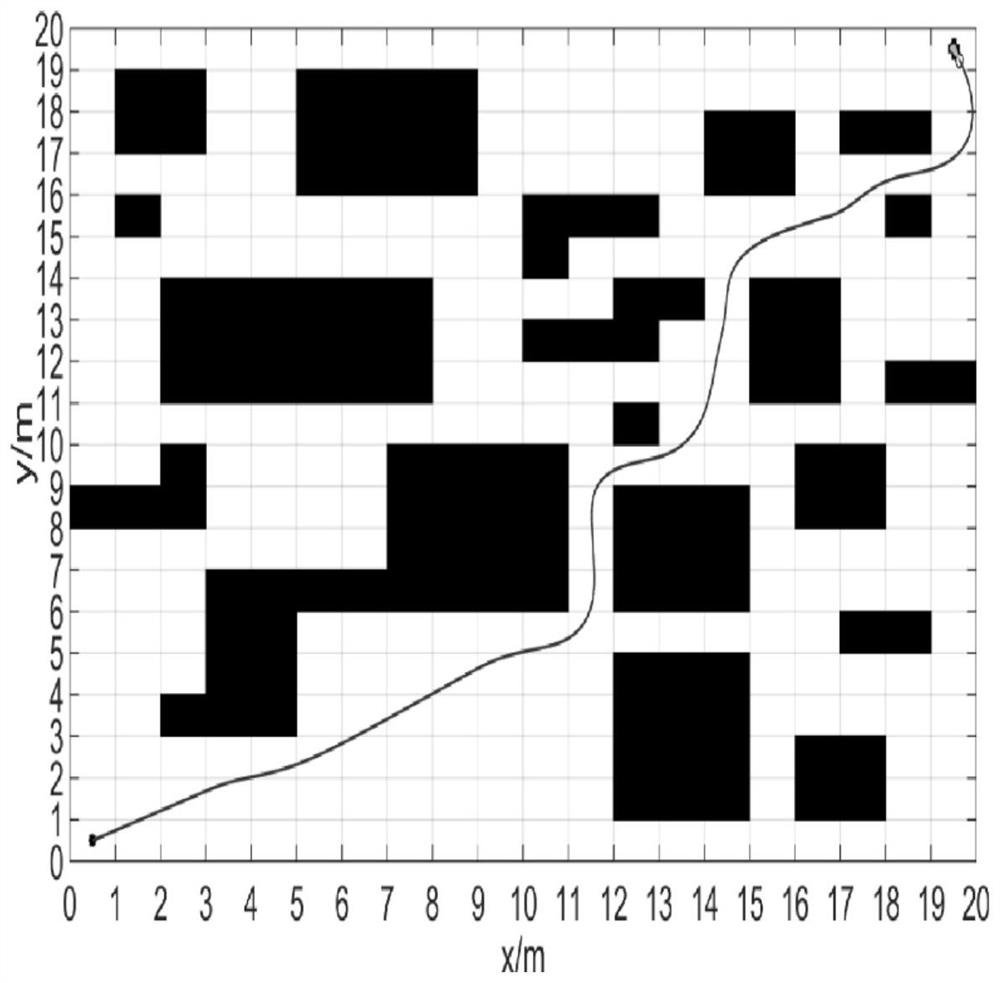
[0108] The invention discloses a mixed path planning method for an indoor mobile robot. The bat algorithm is used for global path planning, and a dynamic window method is used on this basis to realize global path optimization and real-time obstacle avoidance. Technical scheme of the present invention is as follows:
[0109] The present invention provides a flow chart of a hybrid path planning method for an indoor mobile robot as shown in figure 1 As shown, the specific process is as follows:
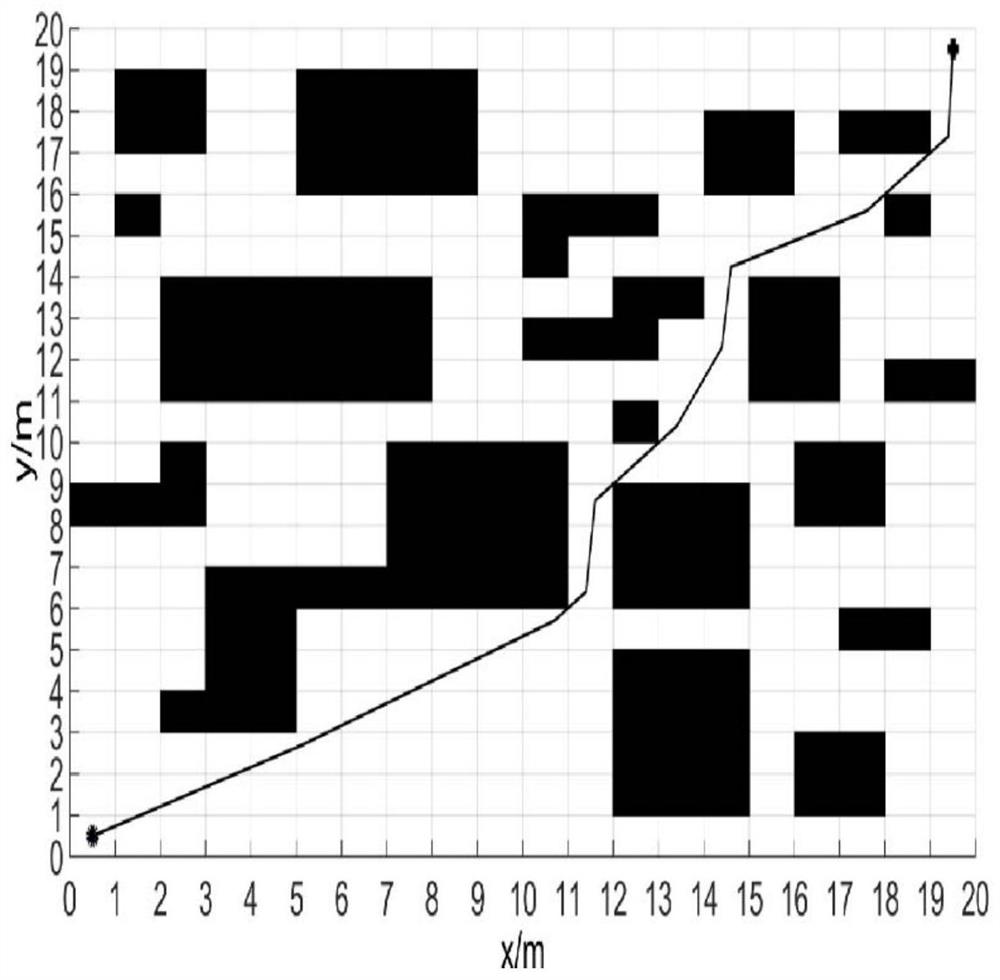
[0110] Step 1: Assuming that the working space of the robot is a two-dimensional plane, use the grid method to model the space where the robot is located. The horizontal direction is the x-axis, the vertical direction is the y-axis, and the black grid has obstacles, which are obstacle grids grid, the white grid does not contain obstacles, it is a free grid.
[0111] Step 2: Initialize the parameters of the algorithm, including the number of iterations T, the number of bat populations N...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More