

Multi-AGV scheduling method applied to large logistics system
A logistics system and scheduling method technology, applied in logistics, data processing applications, instruments, etc., can solve the problems of slow operation, low site utilization, and increased calculation volume of the scheduling system, reducing workload, improving operation efficiency, Avoid conflicting effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0029] In order to make the purpose, content, and advantages of the present invention clearer, the specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
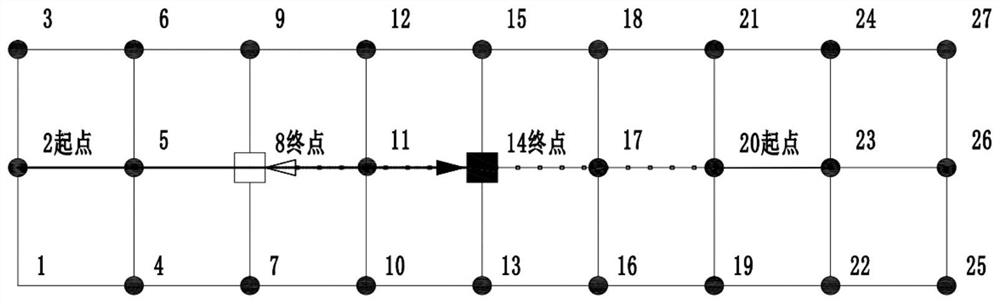
[0030] 1) First, establish a coordinate system according to the actual environmental conditions, number each node in sequence and specify the coordinates of each node. The coordinates of all nodes correspond to their numbers one by one and are unique.
[0031]2) When there is a task, the system selects the appropriate AGV to accept the task. First use the algorithm with a moderate function to plan the path of each AGV, find out the optimal path for the corresponding task, effectively avoid obstacles, and reach the destination smoothly.
[0032] 3) Perform time synchronization processing for all AGVs that accept tasks, and monitor the location, load status, and driving speed of all AGVs in real time. Adopting the traff...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More