Lower limb rehabilitation robot and motility control method thereof
A technology of rehabilitation robot and control method, which is applied in the direction of sports accessories, gymnastics equipment, passive exercise equipment, etc., to achieve the effect of expanding the scope of use and user groups
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
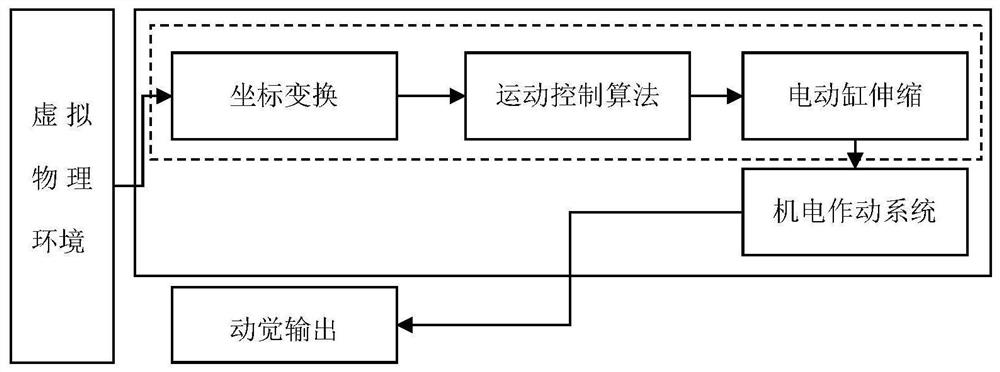
[0081] This embodiment provides a kinesthetic control method based on a lower limb rehabilitation robot, such as figure 2 Shown to u3, this method comprises steps:
[0082] S1: Determine whether the current state of the spinal cord injury patient is the preset early rehabilitation state;
[0083] S2: If the current state of the spinal cord injury patient is the preset early rehabilitation state, perform motion reversal on the lower limb rehabilitation robot according to the preset passive training plan, and drive the lower limb rehabilitation robot to drive the spinal cord injury according to the corresponding passive training process after the motion reversal patient movement;
[0084] S3: If the current state of the spinal cord injury patient is not in the preset early rehabilitation state, the lower limb rehabilitation robot will be corrected according to the preset active training plan, and the lower limb rehabilitation robot will be driven to drive the patient with spin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com