

Distributed robust tracking control method applied to multi-degree-of-freedom mechanical arm
A technology of tracking control and manipulators, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., and can solve problems such as complex algorithms and disturbance uncertainties in decentralized control methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
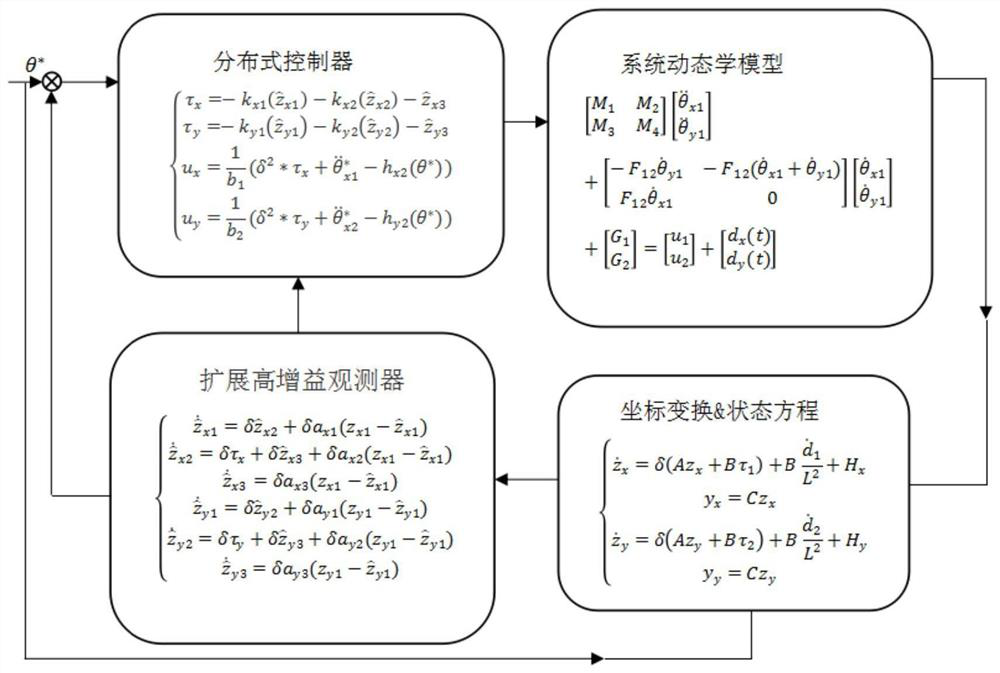
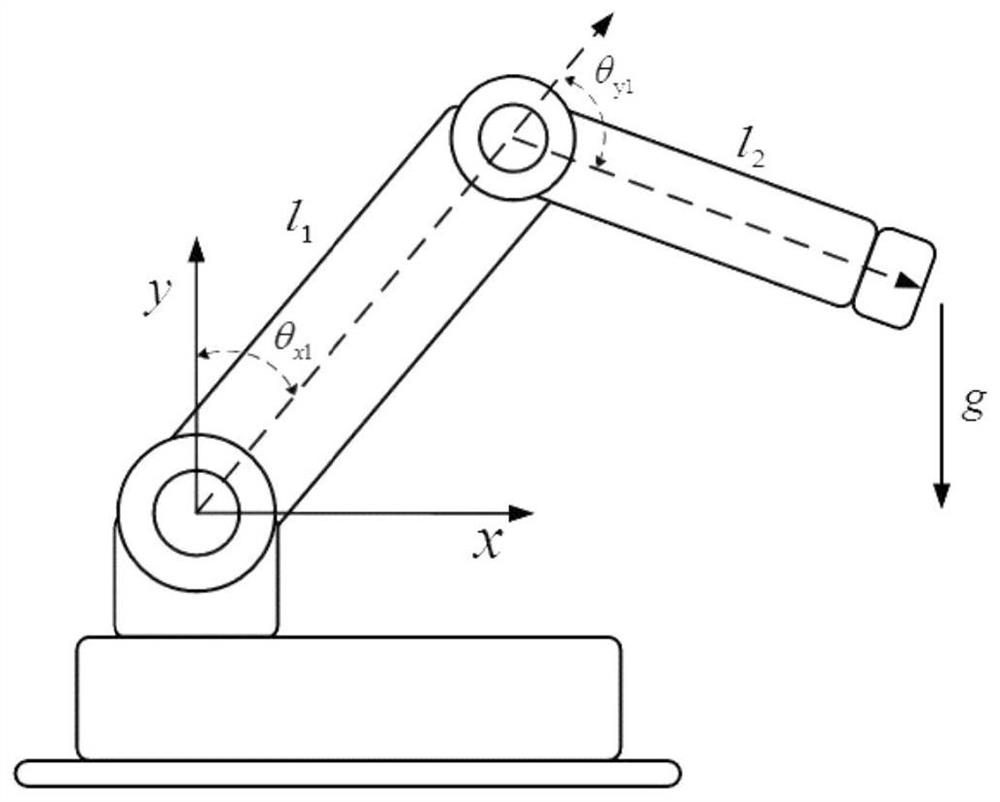
[0069] apply the invention to figure 2 On the shown double-link robotic arm, the arm is mainly composed of joint 1 and joint 2, in the figure, θ x1 Indicates the position of joint 1, θ y1 represents the position of joint 2, l 1 and l 2 represent the lengths of the two segments of the manipulator, respectively. Such as figure 1 As shown, it is a functional block diagram of the present invention, and the distributed robustness is completed through five steps of establishing the dynamics model of the manipulator system, coordinate transformation, state equation construction, designing a high-gain observer, and constructing a distributed robust tracking controller. Track control method. Specifically, a distributed robust tracking control method applied to a multi-degree-of-freedom manipulator includes the following steps:
[0070] Step 1, using the Euler-Lagrangian equation to establish the dynamics equation of the manipulator;
[0071] There are mainly two methods for der...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More