

Disturbance and uncertainty control method based on operation type flying robot
A flying robot and control method technology, applied in aircraft, non-electric variable control, motor vehicles, etc., can solve problems such as the interaction force and torque interference between the rotorcraft and the manipulator
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0121] The invention will be further described below with reference to the accompanying drawings and examples.
[0122] Please refer to figure 2 The present invention provides a method of perturbation and uncertainty control based on job type flight robots, including the following steps:
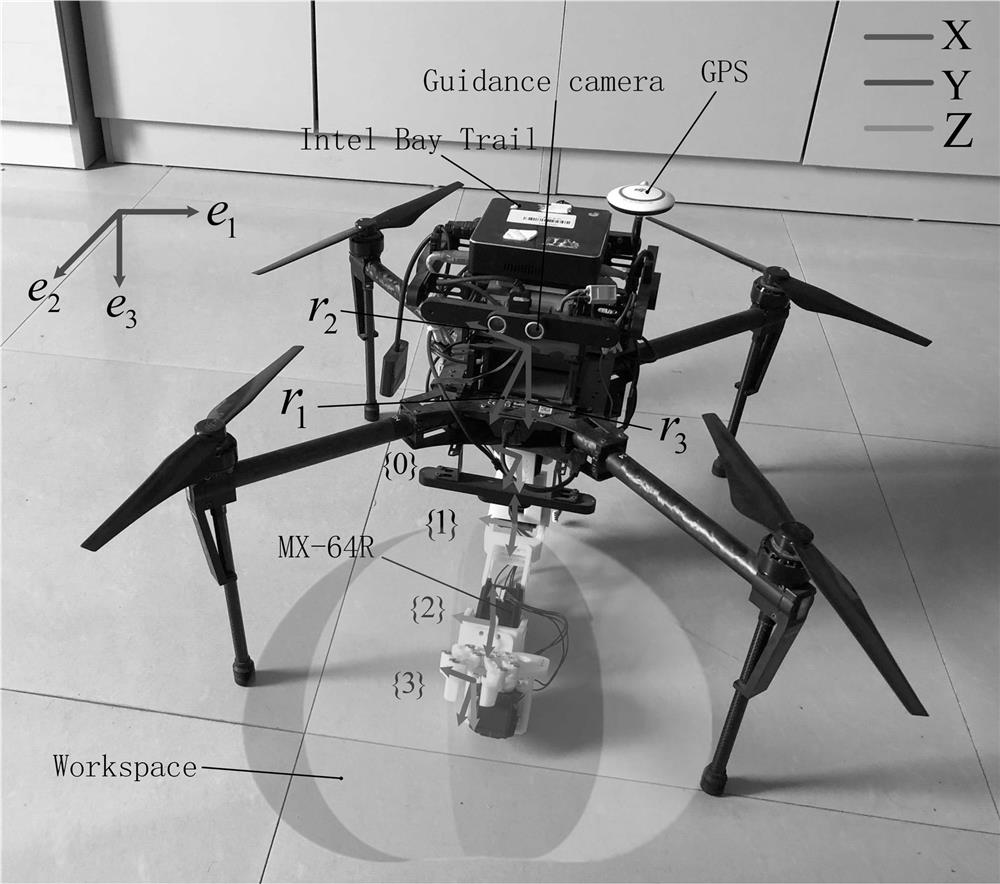
[0123] Step S1: Constructing a work type flying robot system composed of a four-rotor aircraft and a three-degree-freedom active robot, and modeling its kinematics and kinetic models;
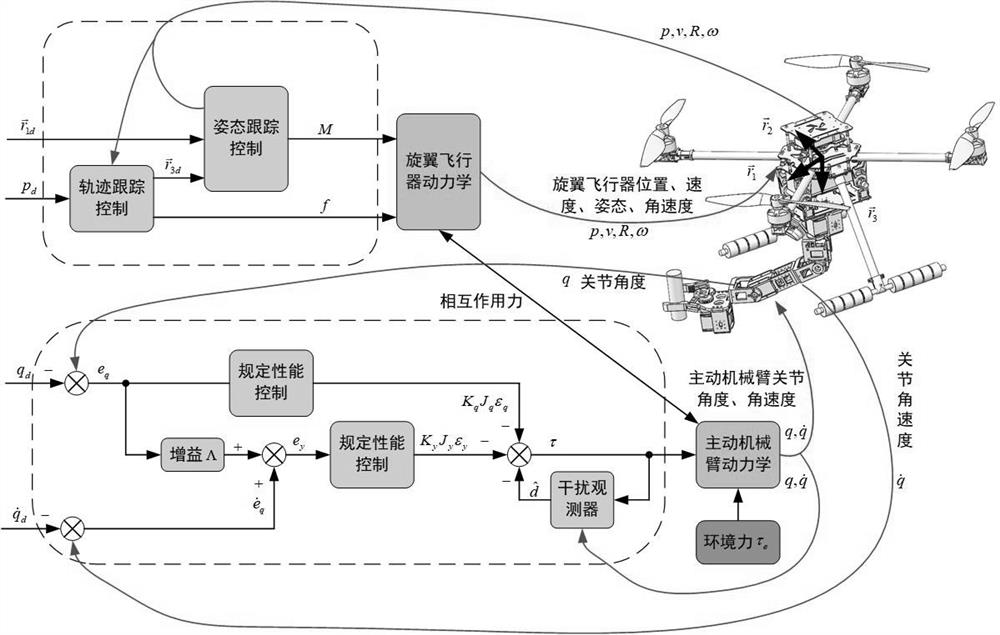
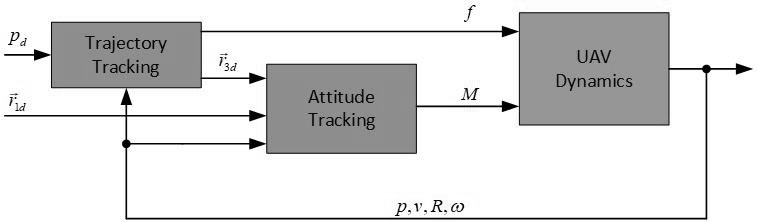
[0124] Step S2: Using geometric control method, in the case of mechanical arm dynamics, the position and posture of the rotorvers are tracked by the rotor aircraft;
[0125] Step S3: Using the modelless active robotic arm control, overcoming uncertainty and external interference brought by the rotorcraft and system working environment;
[0126] Step S4: Lyapunov function controlled by the work type flight robot;
[0127] Step S5: Based on the Lyapunov function, the stability analysis of the rotorcraft of the job ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More