

Automatic driving dynamic target positioning method and device, electronic equipment and storage medium
A dynamic target and automatic driving technology, which is applied in image data processing, instrument, character and pattern recognition, etc., can solve the problem that the solution of dynamic target positioning is not universal
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0042] Embodiment one, exemplary method
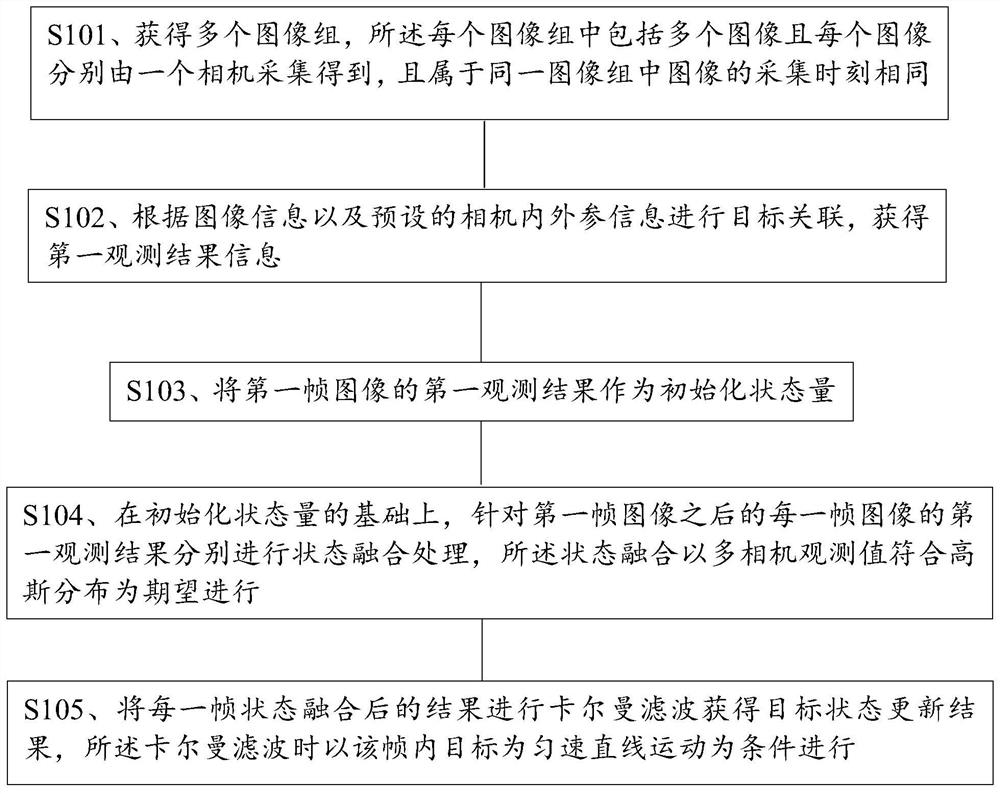
[0043] like figure 1 In the shown specific embodiment of the automatic driving dynamic target positioning method of the present invention, multiple cameras are fixed on the automatic driving vehicle, and the dynamic target is continuously photographed by multiple cameras.
[0044] Include the following steps:
[0045] S101. Obtain a plurality of image groups, each image group includes a plurality of images, each image is captured by a camera, and the images belonging to the same image group have the same acquisition time.
[0046] According to the installation position of each camera on the self-driving vehicle, different angles will appear when shooting, fully reflecting the environment around the vehicle where the camera is located. The images belonging to the same group are collected at the same time, so these images must be related to each other, and the state of the corresponding dynamic target at the shooting time can be obta...
Embodiment 2
[0083] Embodiment two, Exemplary device
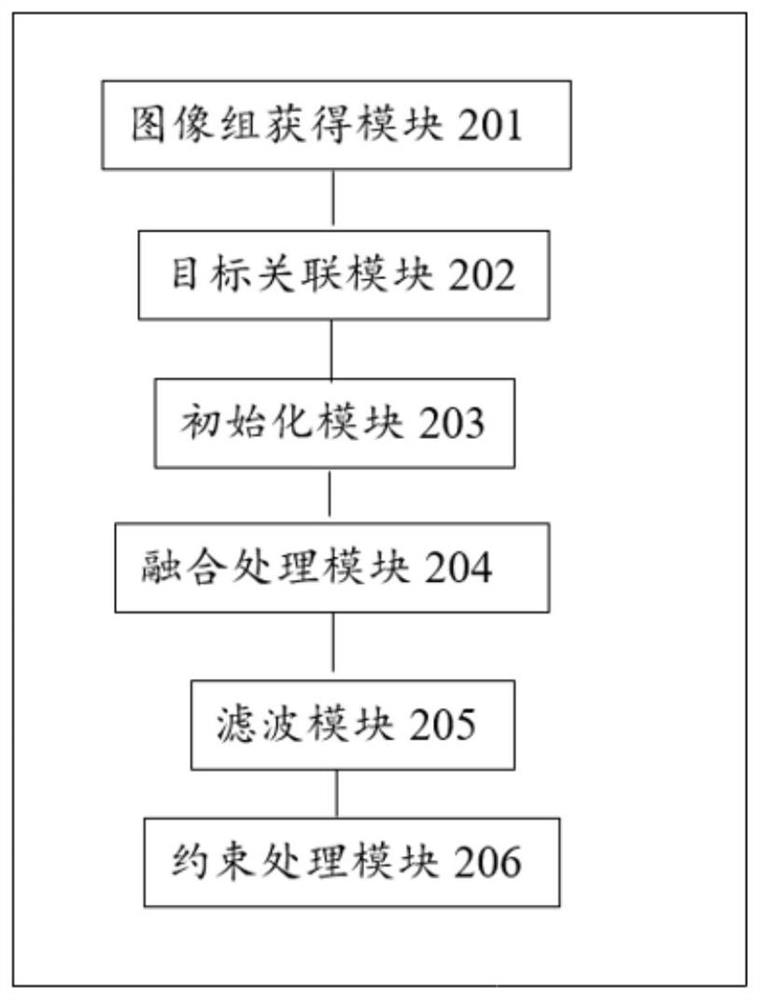
[0084] Another embodiment of the present invention provides a dynamic target positioning device for automatic driving, which uses multiple cameras to continuously shoot dynamic targets, such as image 3 shown, including,
[0085] The image group obtaining module 201 is configured to obtain multiple image groups, each image group includes multiple images and each image is captured by a camera, and the images belonging to the same image group have the same collection time.
[0086] A target association module 202, configured to perform target association according to image information and preset camera internal and external reference information, and obtain first observation result information;
[0087] The initialization module 203 is used to use the first observation result of the first frame image as the initialization state quantity;
[0088] The fusion processing module 204 is used to perform state fusion processing on the first...
Embodiment 3
[0095] Embodiment 3, Exemplary computer program product and computer readable storage medium
[0096] Another embodiment of the present invention provides an electronic device, including a memory, a processor, and a computer program stored in the memory and operable on the processor, and the processor executes the computer program to implement the above-mentioned Method steps.
[0097] The processor is preferably but not limited to a central processing unit (Central Processing Unit, CPU). For example, the processor can also be other general-purpose processors, digital signal processors (Digital Signal Processor, DSP), application specific integrated circuits (Application Specific Integrated Circuit, ASIC), field programmable gate arrays (Field Programmable Gate Array, FPGA) or other Chips such as programmable logic devices, discrete gate or transistor logic devices, discrete hardware components, or combinations of the above-mentioned types of chips.
[0098] As a non-trans...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More