

Robot orientation and hand-eye relationship simultaneous calibration method based on beam adjustment
A technology of hand-eye relationship and beam adjustment, applied in instruments, image data processing, 3D modeling, etc., can solve the problems of inability to meet the requirements of intelligent robot visual navigation and positioning accuracy, unstable and low accuracy of equation solving
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
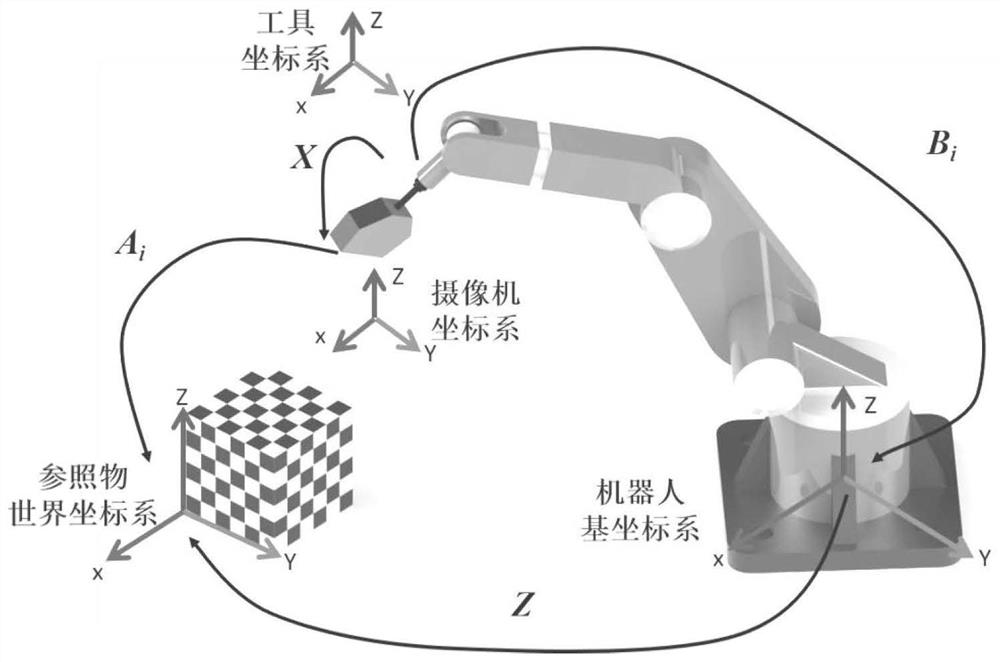
[0047] The purpose of the present invention is to provide a simultaneous calibration method of robot orientation and hand-eye relationship based on beam adjustment. Based on the beam adjustment algorithm, it can accurately position the target in three dimensions while solving the hand-eye relationship between the robot and the camera. At the same time, it also realizes the positioning of the detection target in the world coordinate system, truly endowing the po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More