

Multi-robot monitoring method suitable for production line operation
A multi-robot and production line technology, applied in the direction of instruments, computer components, data processing applications, etc., can solve the problems of small positioning range, complex structure, inconvenient promotion and use, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0075] A kind of multi-robot monitoring method suitable for production line operation of the present invention is specifically implemented according to the following steps:
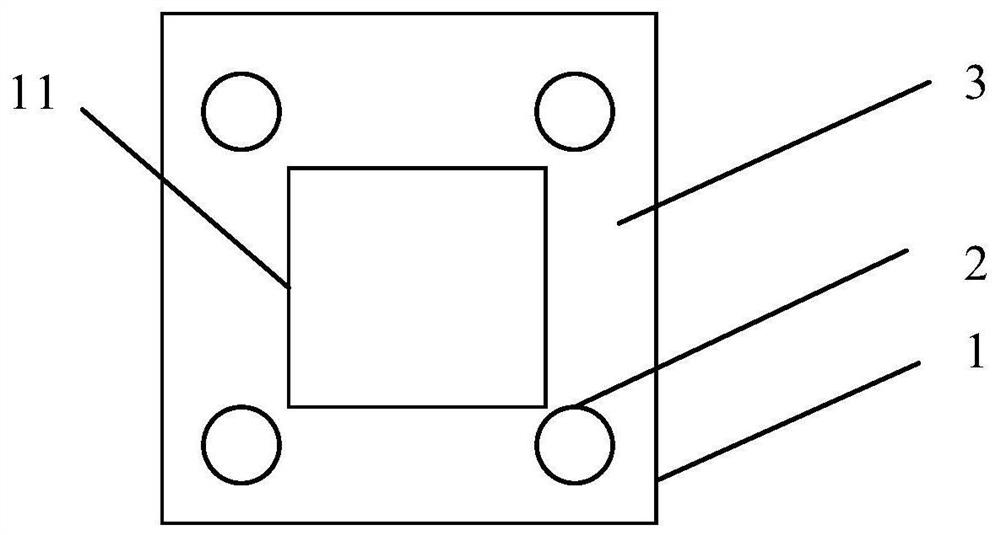
[0076] Step 1, utilize target, computer 8, wireless transceiver 9, two-dimensional turntable 6, CCD camera 5 to construct a multi-robot monitoring system; The target that the present invention adopts, target size is 40*40mm, and its structure is as follows figure 1 As shown, a cube-shaped housing 1 is included, and a drive circuit 3 is arranged inside the housing 1. Four positioning light spots 2 of the same size are arranged on the working surface on the outer wall of the housing, and the positioning light spots 2 are all infrared LED, 4 positioning light spots 2 arranged in a square;
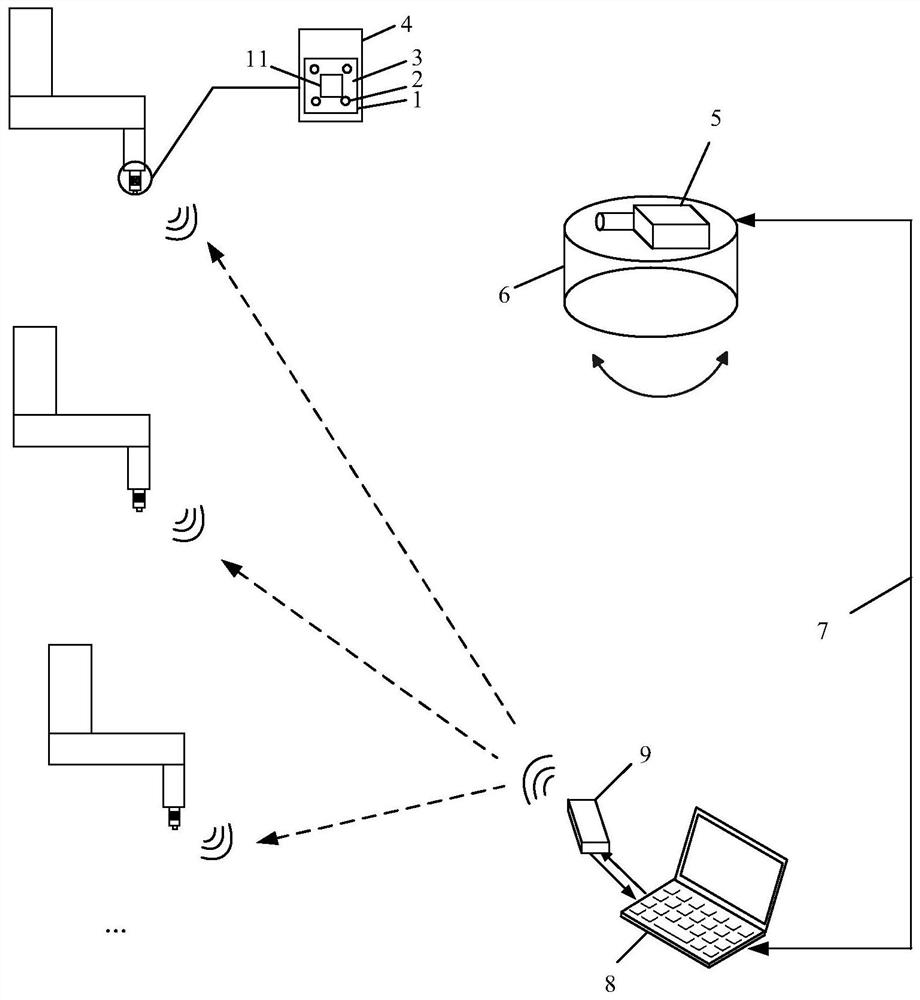
[0077] like figure 2 As shown, the multi-robot monitoring system includes a plura...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More