

Omnidirectional mobile robot trajectory tracking control method based on selective disturbance compensation
A technology of disturbance compensation and omnidirectional movement, which is applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., can solve the problems of system stability and harmfulness, reduce the control accuracy of the control system, and speed up the energy dissipation of the system, so as to avoid compensation and achieve high performance. Trajectory tracking control, guaranteed stability and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0040] In order to make the purpose, technical solution and advantages of the present invention clearer, the implementation manners of the present invention will be further described in detail below.
[0041] Step 1: Establish a dynamic model of the omnidirectional mobile robot system
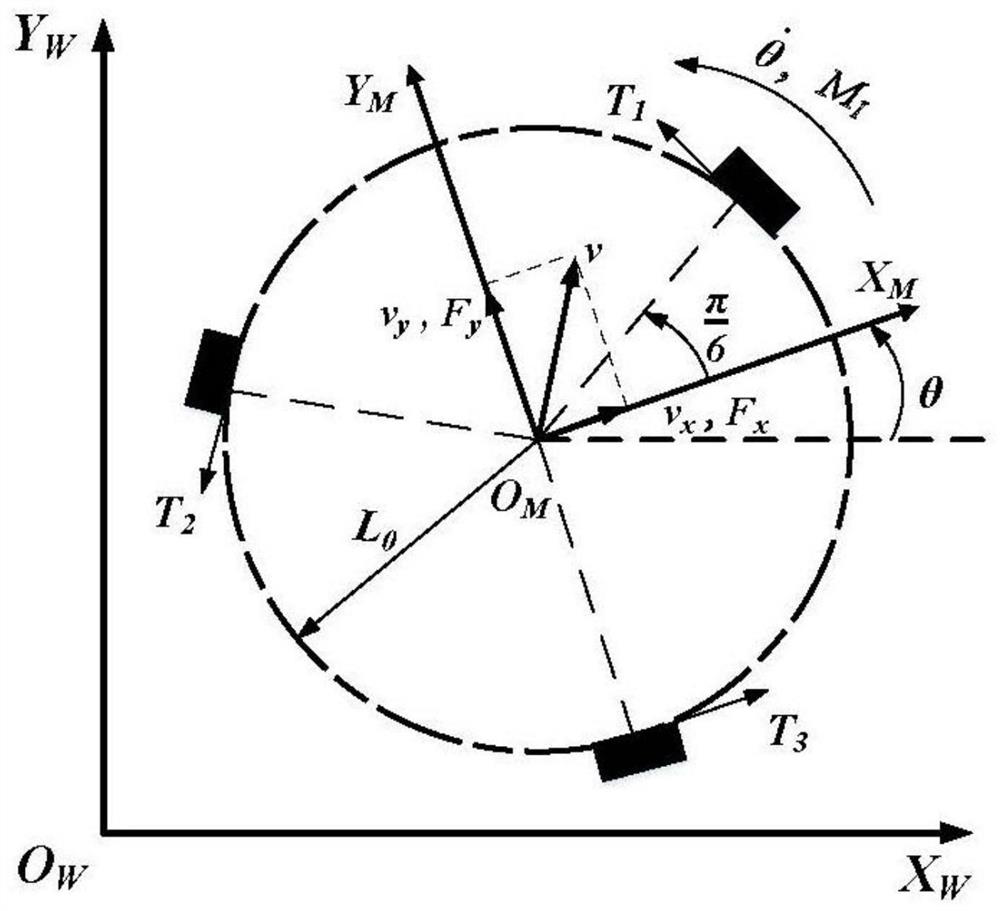
[0042] Define the world coordinate system {W} and the mobile coordinate system {M}, and use an unknown vector to represent the total disturbance of the system, including the unmodeled part, the uncertainty of parameters and external disturbances, etc., so as to obtain the omnidirectional Mobile robot dynamics model:
[0043]
[0044] In the formula, q=[x y θ] T Indicates the pose of the robot in the world coordinate system; is the time derivative of the pose q, which represents the plane velocity and angular velocity of the robot in the world coordinate system; is the second derivative of pose q with respect to time, which represents the plane acceleration and angular acceleration of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More