

Library book taking and returning robot system
A robot system and library technology, applied in the direction of manipulators, program-controlled manipulators, storage devices, etc., can solve problems such as bookshelves that are not considered, and achieve the effect of realizing intelligence and unmanned, reducing workload, and complete functions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
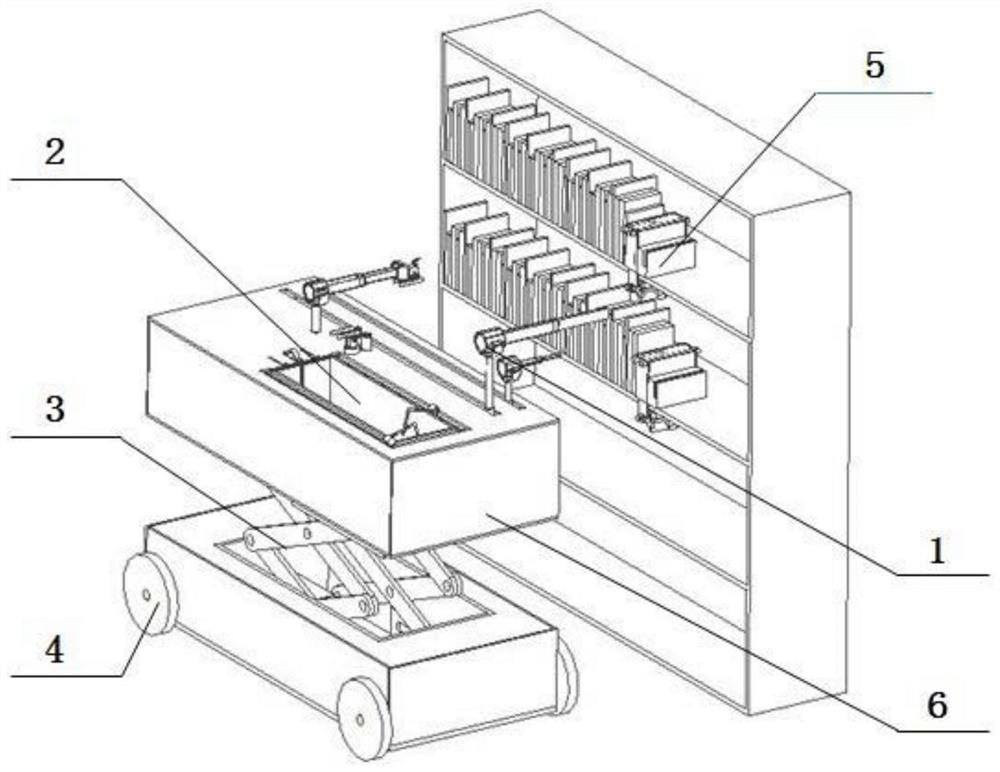
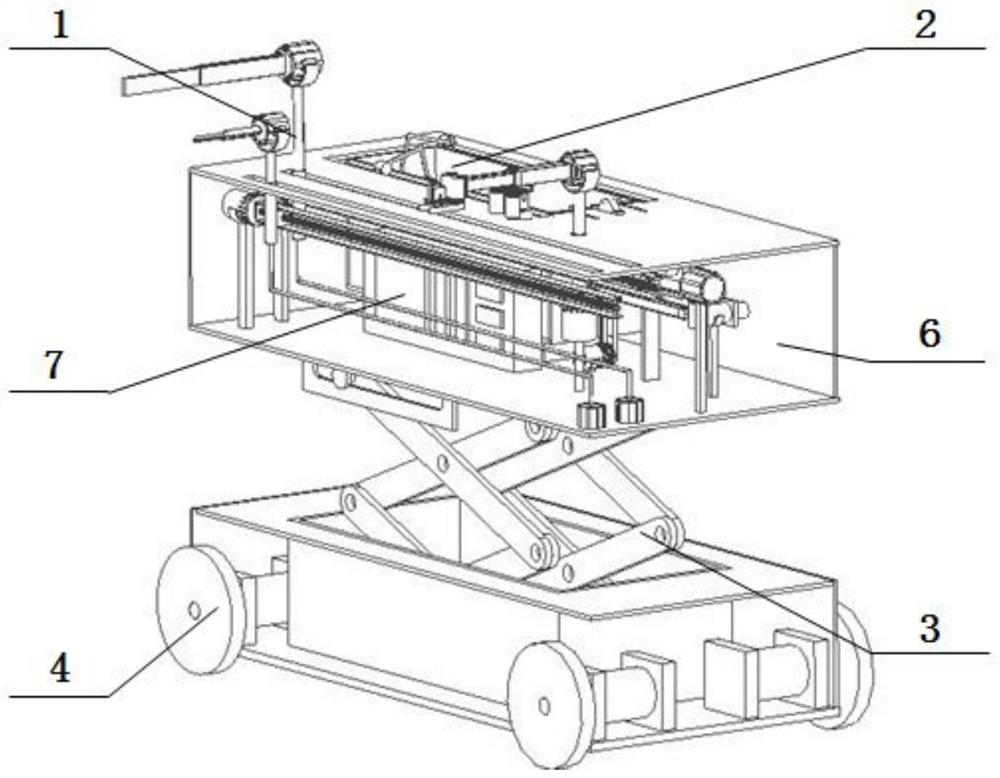
[0135] This embodiment proposes a robot for automatically taking and returning books in a library, and its structure can be found in figure 1 with figure 2 shown, including:
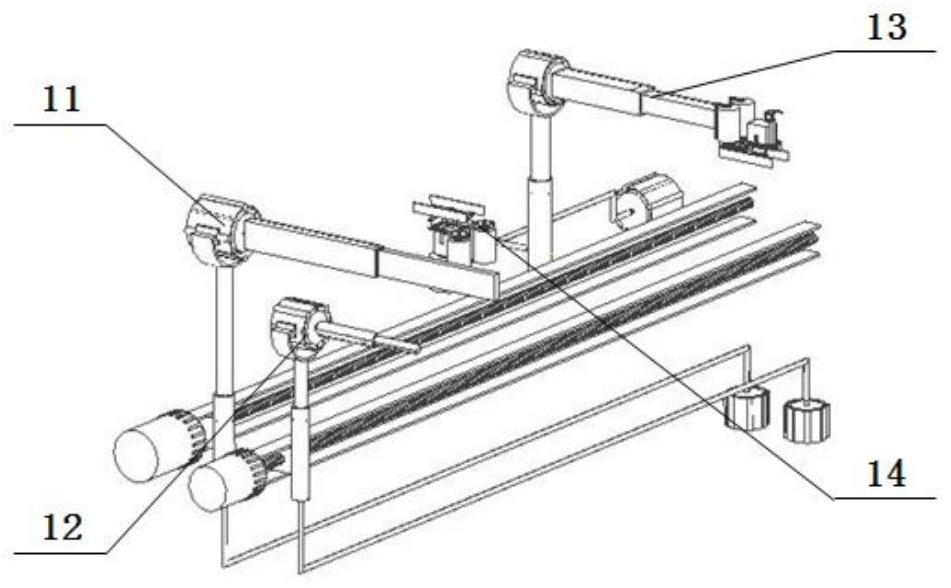
[0136] Manipulator module 1: For details, see image 3 , including the long arm 11 used to push the book and the lock against the book to prevent it from falling during the process of taking and returning the book, and the short arm 12 used to open and close the lock and hold the book to prevent it from falling during the process of taking and returning the book 1. It is used to take out the book from the bookshelf when taking the book and put the book into the bookshelf when returning the book. The gripping arm 13 is used to take the book from the gripping arm during the book taking and put the book back when returning the book. The small arm part 14 removed from the lifting mechanism of the book access module;
[0137] Book Access Module 2: For details, see Figure 9 , including a book elevating m...
Embodiment 2
[0162] The entire book fetching process is roughly divided into four parts, which are respectively the book fetching process of the gripping arm 13 , the book receiving process of the small arm 14 , the book access process, bookshelf sorting and the reset process of the mechanical arm module 1 .
[0163] Clamping arm part 13 takes book process as Figures 21 to 28 shown. At first the robot moves to the designated bookshelf, finds the position of the book to be taken out by the camera 1312 on the gripping arm 13, then hooks the top of the book with a hook; then the gripping arm extension 1321 shrinks, and the gripping arm The lifting section 1323 descends, and these two actions cooperate with each other to make the book be hooked out of the bookshelf at a certain angle; after the book is hooked out of the bookshelf, the clamping arm splint 1318 will clamp the book under the control of the clamping arm splint motor 1317, At the same time, the extension section 1321 of the clamp...
Embodiment 3
[0168] The entire book return process is also roughly divided into four parts, which are the gap manufacturing process, the book box delivery process, the gripping arm 13 book delivery process, bookshelf arrangement and the mechanical arm module 1 reset process. Considering efficiency factors, different processes will overlap in time.
[0169] The gap manufacturing process such as Figures 42 to 47 and Figures 51 to 53 shown. Firstly, the robot determines the position where the book should be inserted according to the label on the book to be returned and the label on the bookshelf. The gripping arm 13 will use the camera 1312 to locate the book on the left side of the insertion position, and then use the hook to hook the book; the long arm 11 moves to the corresponding position of the mechanical lock 5, the extension section 111 of the long arm is extended and inserted into the gap of the mechanical lock 5, the short arm part 12 moves to the corresponding position, the exte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More