

Indirect driving high-precision servo implementation method under nonlinear interference
A realization method and high-precision technology, applied in the direction of offensive equipment, projectiles, self-propelled projectiles, etc., can solve the problems of servo performance degradation, etc., and achieve the effect of reducing the magnitude of the torque and making it easy to predict
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in detail below with reference to the accompanying drawings and examples.
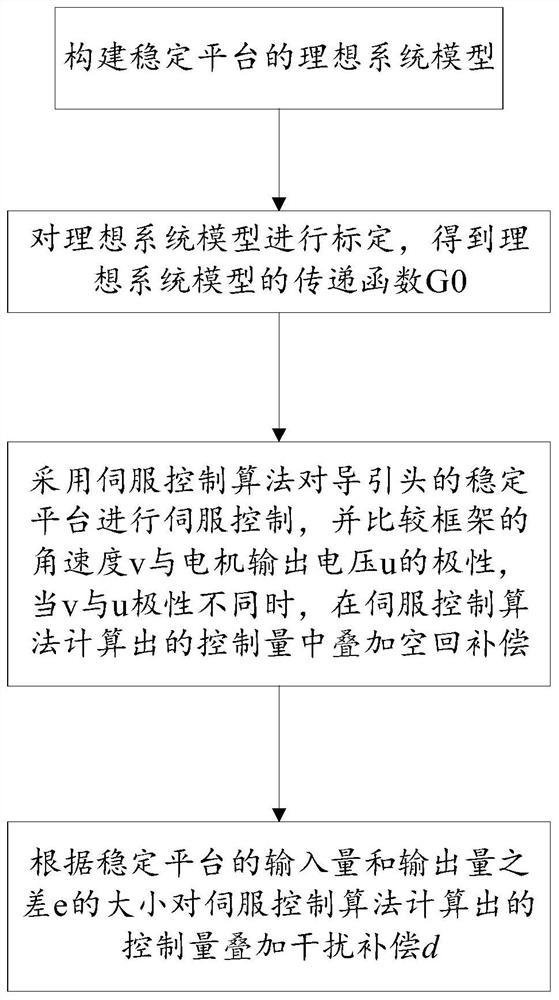
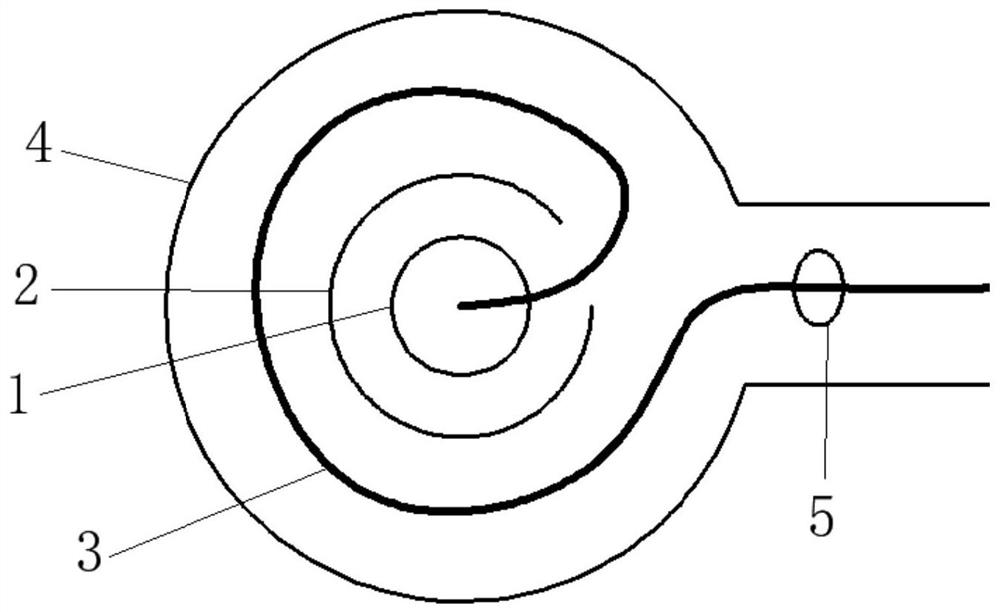
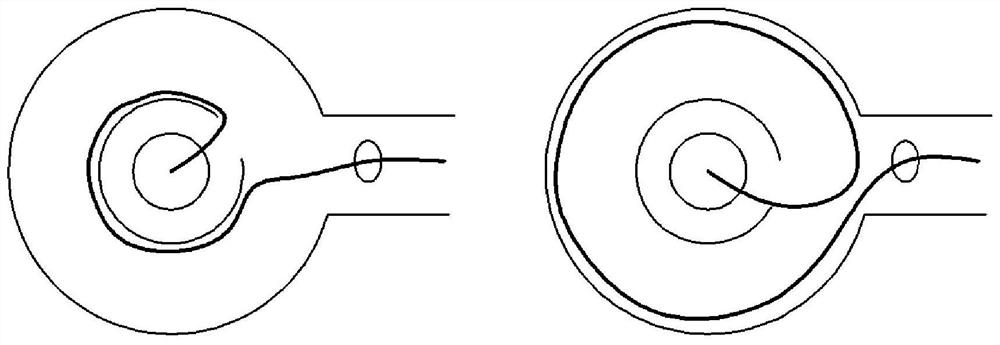
[0022] The invention provides an indirect drive high-precision servo implementation method under nonlinear interference, which is used for servo control of the stable platform of the seeker. The stable platform includes a motor, a frame and a gear drive structure, wherein the gear drive structure includes a meshing The driving end gear and the load end gear, wherein the driving end gear is sleeved on the output shaft of the motor, and the load end gear is sleeved on the drive shaft of the frame. It is characterized in that the shaft-through cable adopted by the stable platform is a spiral wiring method; And the method flow is as follows figure 1 shown, including the following steps:
[0023] Construct the ideal system model of the stable platform, specifically: take out the through-shaft cable in the stable platform, replace the through-shaft connection w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More