

Design method and application of unmanned aerial vehicle variable parameter neurodynamics controller
A design method and unmanned aerial vehicle technology, applied in the direction of non-electric variable control, attitude control, control/adjustment system, etc., can solve the dependence of PID controller parameter setting, it is difficult to complete the control task with high precision parameters, and the convergence speed is not enough Completing time-varying mission objectives and more
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0108] The present embodiment provides a design method of a UAV variable parameter neural dynamics controller, comprising the following steps:
[0109] S1: Build a UAV model, the specific steps include:
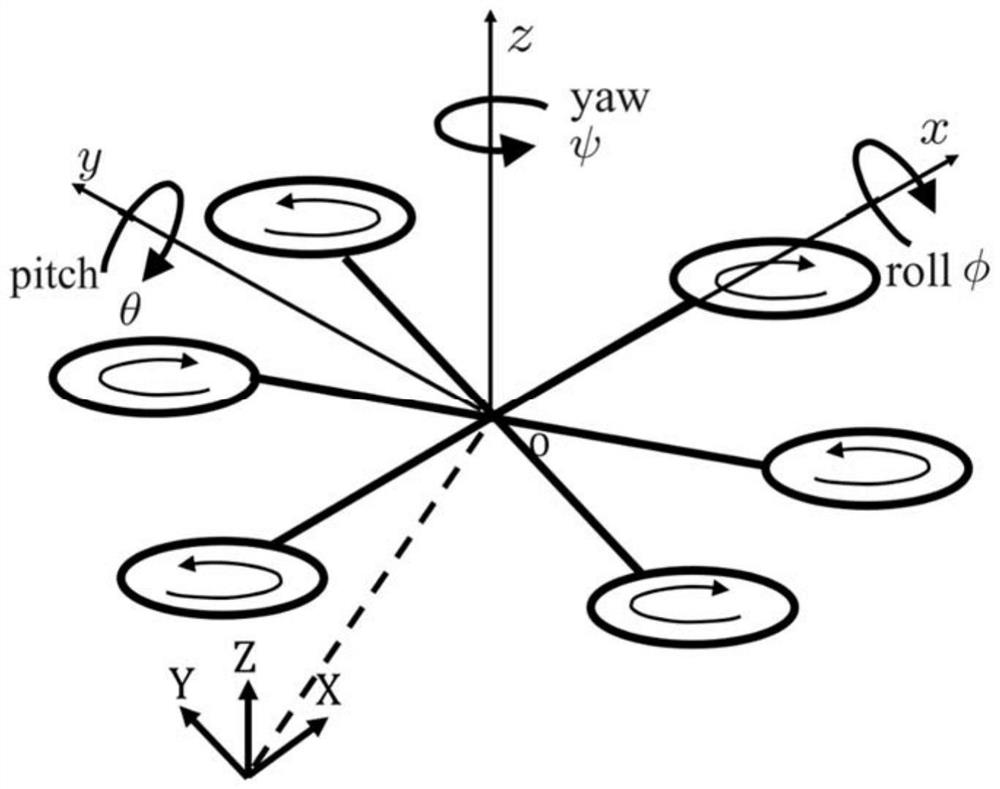
[0110] In order to accurately define and describe the attitude of a UAV, it is necessary to determine six variables, namely the three-dimensional coordinates of the UAV and its three attitude angles. The UAV in this embodiment uses a quadrotor UAV ;
[0111] Such as figure 1 As shown, establish a rectangular coordinate system: define the flight direction of the drone as the positive direction of the x-axis, define the upward direction perpendicular to the plane of the drone as the positive direction of the z-axis, and define the y-axis direction as perpendicular to the x-axis and z-axis The direction of the axis, according to the above-mentioned axial direction, establishes a coordinate system describing the position and flight attitude of the drone, which is called the bod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More