Air-ground dual-purpose unmanned aerial vehicle
A UAV, dual-use technology, applied in the field of UAVs, can solve the problems of low distribution efficiency, high distribution risk factor, and restrictions on UAV distribution application scenarios.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The core of the present invention is to provide an air-ground dual-purpose unmanned aerial vehicle, which can fly in the air and walk on the ground, can be applied to uneven ground, and has strong adaptability.
[0043] In order to enable those skilled in the art to better understand the technical solution of the present invention, the air-ground dual-purpose UAV of the present invention will be described in detail below in conjunction with the accompanying drawings and specific implementation methods.
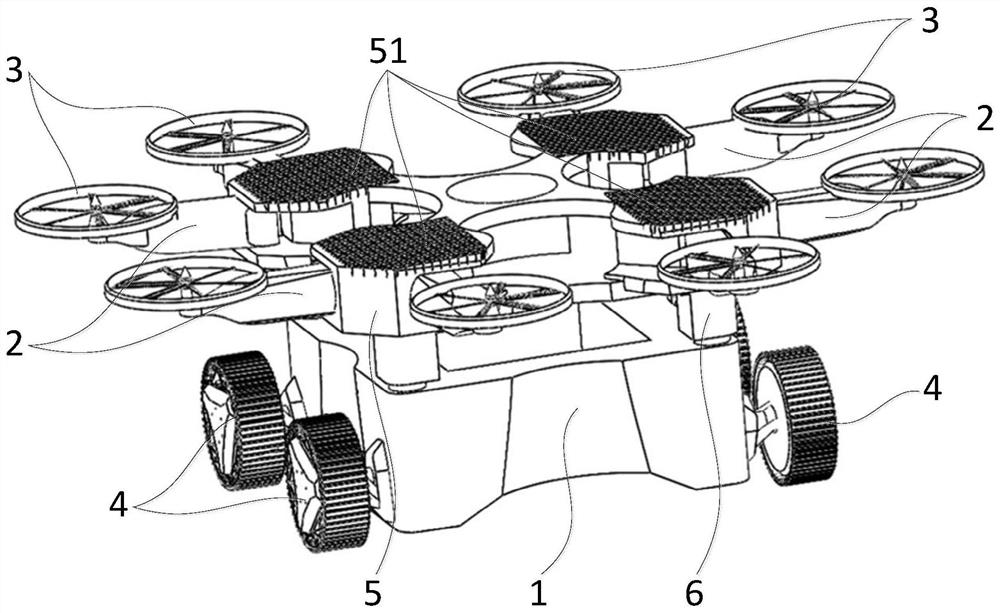
[0044] Such as figure 1 As shown, it is an axonometric schematic diagram of a specific embodiment of the air-ground dual-purpose drone provided by the present invention; the air-ground dual-purpose drone of the present invention includes a fuselage 1, and the fuselage 1 is the main part of the entire drone. Install other components thereon; the fuselage 1 is provided with a foldable flight support 2, the flight support 2 can be stretched and folded relative to the fusel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com