

Unmanned vehicle, transverse control method thereof and electronic equipment
An unmanned vehicle and lateral control technology, applied in the field of unmanned vehicles and their lateral control methods, and electronic equipment, can solve problems such as incomplete consideration of influencing factors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
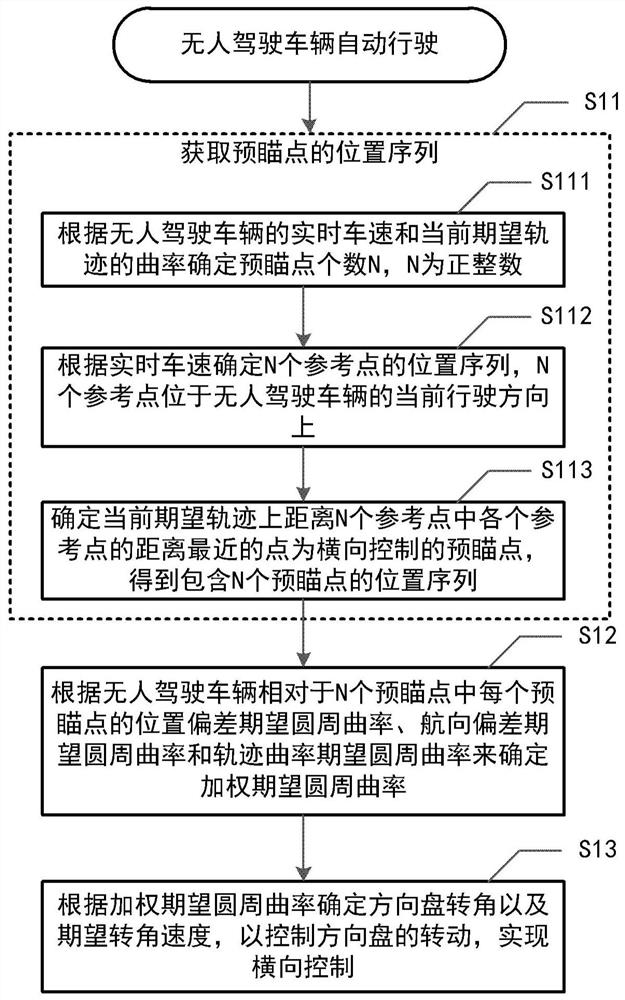
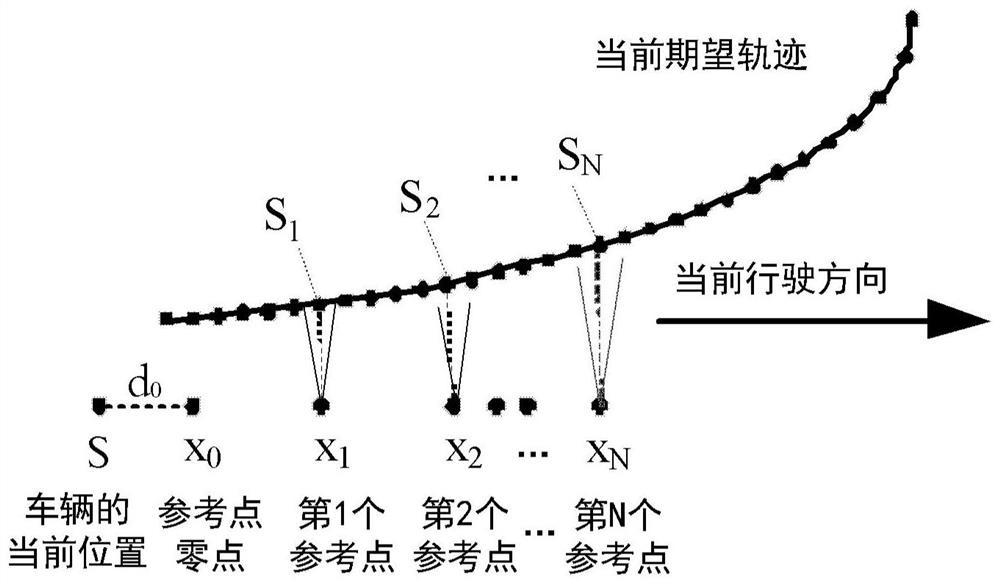
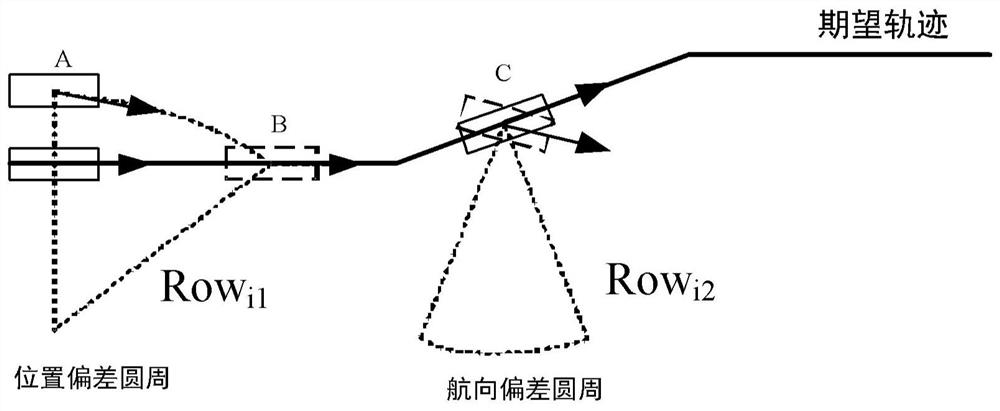
[0055] Embodiments of the present disclosure provide an unmanned vehicle, its lateral control method, and electronic equipment, and consider the influence factors of trajectory curvature, position and heading in real time during the automatic driving process of the unmanned vehicle (which may be referred to as a vehicle for short) , by adaptively calculating the preview point, and adjusting the weights of the trajectory curvature, position and heading factors in real time based on the real-time running state of the vehicle, so as to obtain the weighted expected circular curvature in line with the actual scene, and control the actuator based on the above weighted expected circular curvature Execution of lateral motion improves the real-time accuracy of lateral control of unmanned vehicles.
[0056] In order to make the purpose, technical solutions and advantages of the present disclosure clearer, the present disclosure will be further described in detail below in conjunction wit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More