A power-based online detection method for abnormal motion of industrial manipulators
A technology for industrial machinery and anomaly detection. It is used in machine gear/transmission mechanism testing, electrical power measurement, electrical measurement, etc. It can solve problems such as high cost, unreliable data, and noise interference, achieve good real-time response performance, reduce The probability of being tampered with and the effect of reducing the false detection rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] Preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
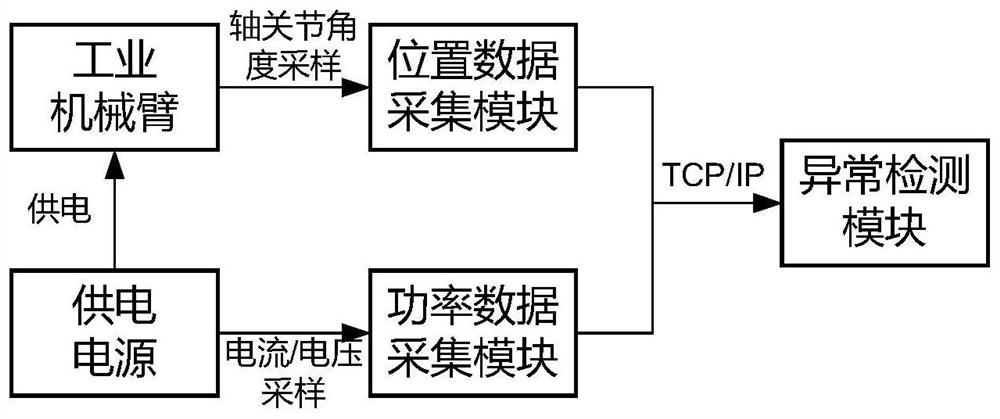
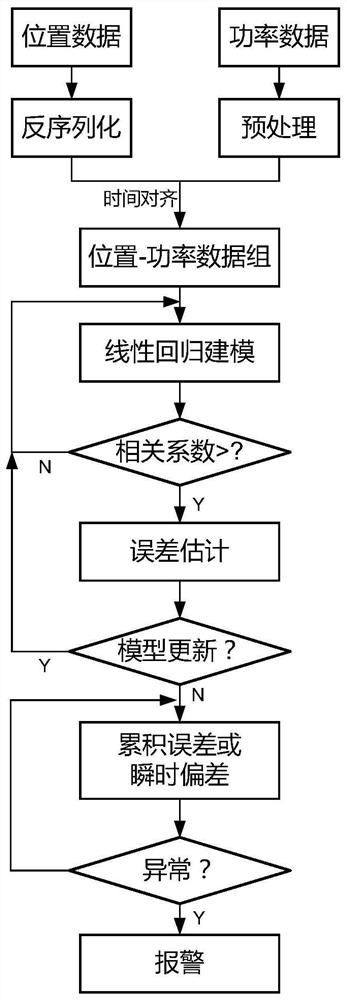
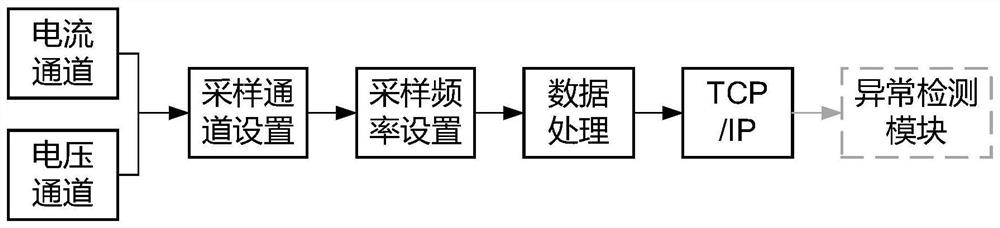
[0043] The power-based online detection method for abnormal motion of the industrial manipulator proposed by the present invention uses power and position asynchronous sampling data to solve time synchronization, and then identifies the dynamic model of the industrial manipulator through model parameter identification (for example, regression fitting can be used) The generalization parameters of , provide a basis for further judging the motion state of the manipulator through cumulative deviation or instantaneous deviation. The detection method proposed by the invention utilizes the characteristics of strongly correlated data to realize state verification, and provides a new idea for the problem of abnormal detection in an open environment.
[0044] The power-based online detection method for abnormal motion of industrial manipulator proposed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More