

Actively and passively hybrid-driven lower limb-assisted exoskeleton robot and control method
An exoskeleton robot, hybrid drive technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of cumbersome, complex structure, drive redundancy, etc., to improve comfort, reduce control difficulty, reduce motor and deceleration The effect of the introduction of the
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be described in further detail below in conjunction with the accompanying drawings.
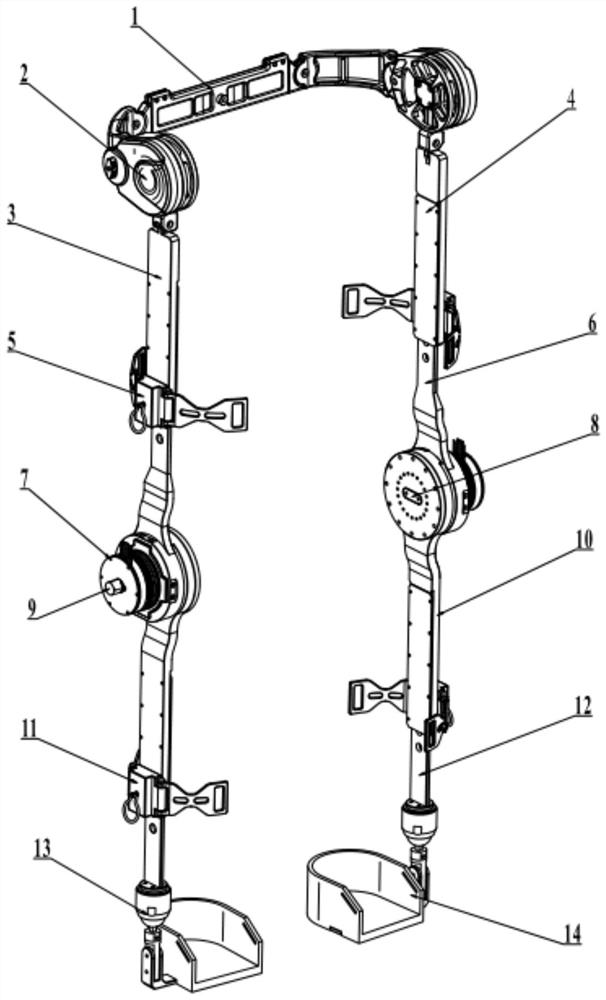
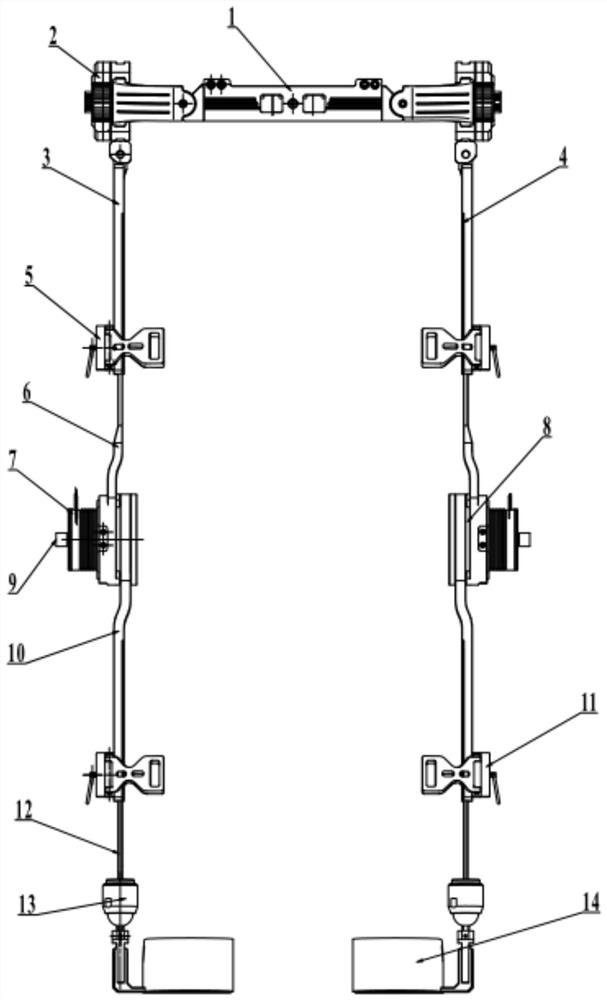
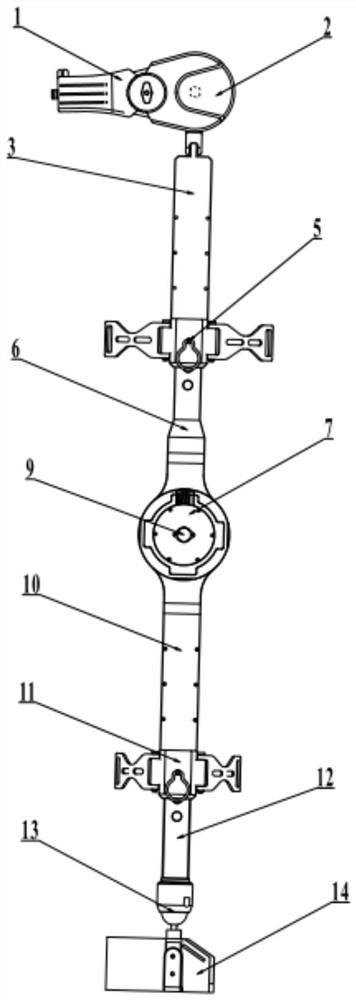
[0055] like Figure 1-Figure 3 As shown, a lower limb power-assisted exoskeleton robot with active and passive hybrid drive includes a waist and hip bracket and two sets of leg mechanisms. The two sets of leg mechanisms are symmetrically installed on the waist and hip bracket. The waist and hip bracket includes a Adjust the waist frame 1 and the hip joint power coil spring mechanism 2, the leg mechanism includes the upper thigh rod 3, the leg shell 4, the thigh fixing and binding mechanism 5, the lower thigh rod 6, the knee joint driving motor 7, and the harmonic reducer 8 , knee joint angle sensor 9, upper calf bar 10, calf fixing and binding mechanism 11, lower calf bar 12, ankle joint ball hinge 13 and foot 14, adjustable waist frame 1, hip joint power-assisted coil spring mechanism 2, upper thigh Rod 3, lower thigh rod 6, upper calf rod 10, lower calf ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More