

Layered point cloud segmentation method based on DBSCAN
A technology of layered point and point cloud data, applied in the field of LiDAR point cloud data information extraction, can solve the problems of DBSCAN under-segmentation, over-segmentation, missing point cloud data, etc., and achieve the effect of improving computing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The technical solution of the present invention will be specifically described below in conjunction with the accompanying drawings.
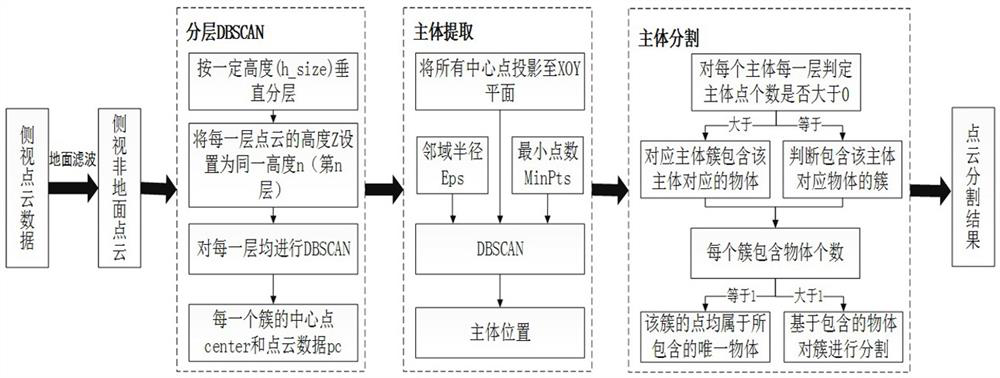
[0057] The invention provides a layered point cloud segmentation method based on DBSCAN, comprising the following steps:
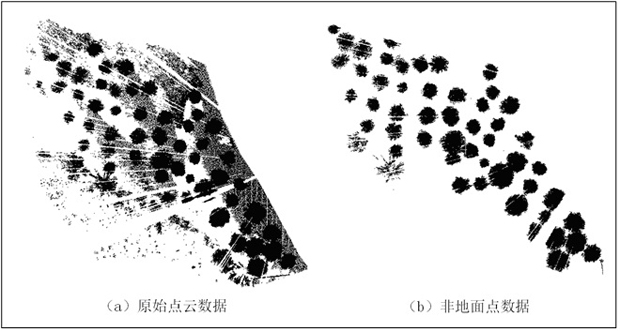
[0058] Step S0: Obtain the side-view laser point cloud data through the ground-based laser scanner or the mobile laser scanner, and use the cloth simulation filter algorithm CSF in the CloudCompare software to perform ground filtering on the point cloud data to segment ground points and non-ground points;
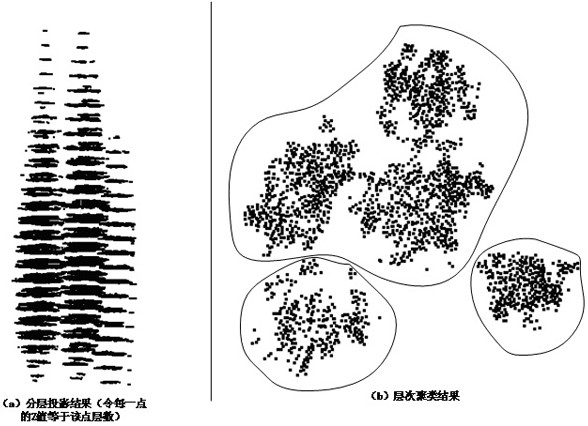
[0059] Step S1: Vertically stratify the point cloud data based on the layer height H of the non-ground point cloud, project each layer of point cloud data to the XOY plane and perform a DBSCAN clustering, and obtain the center point of each cluster ;
[0060] Step S2: According to the consistency of the position distribution of most objects at different heights, perform a DBSCAN clustering on the projection of all...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More