

Trajectory tracking control method for multipurpose wheeled mobile robot
A mobile robot, trajectory tracking technology, applied in general control systems, adaptive control, control/regulation systems, etc., can solve the problem that the reference linear velocity is 0 or the reference angular velocity is 0, the application is cumbersome and unpractical, and the control parameters are too high. Many problems, to achieve the effect of wide application and convenience, significant control effect, and direct control method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The present invention will be further described below in conjunction with the accompanying drawings.
[0054] A kind of track tracking control method of multi-purpose wheeled mobile robot of the present embodiment, the step comprises:
[0055] Step 1: Establish the kinematics model of the wheeled mobile robot and give the kinematics equation of the reference trajectory.
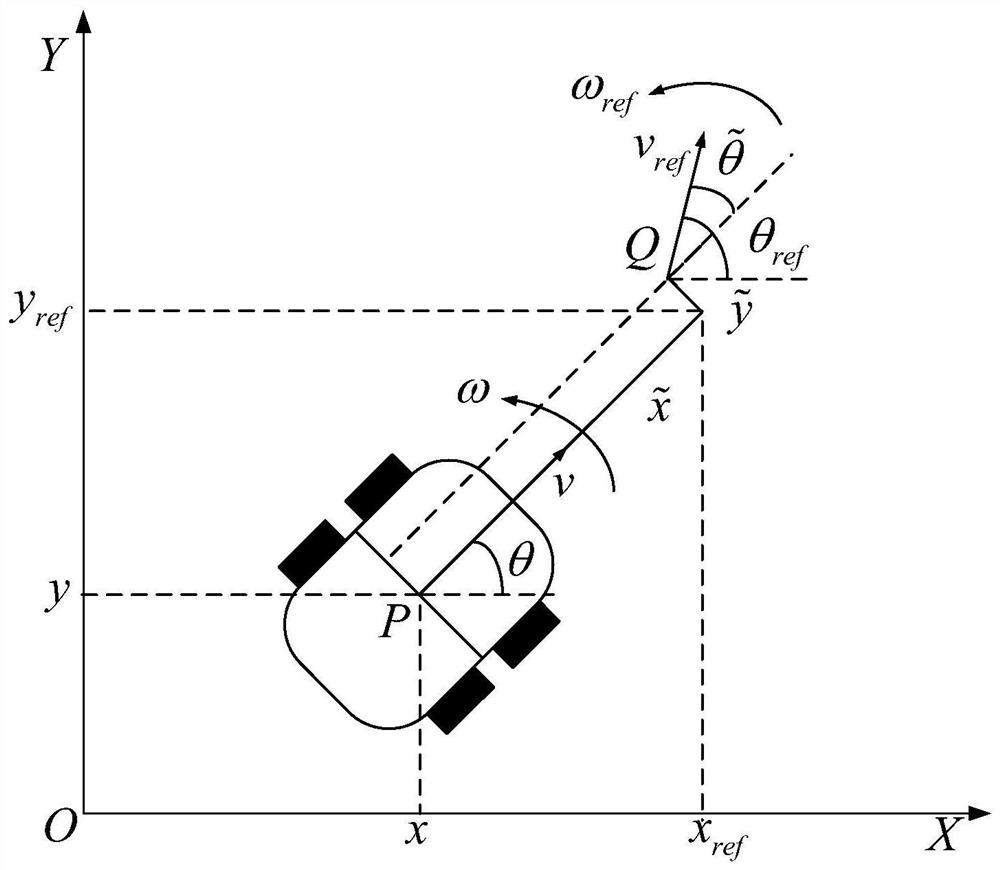
[0056] The trajectory tracking diagram of a wheeled mobile robot is shown in figure 1 shown. X-Y is the established plane Cartesian coordinate system. Point P is the center of mass of the wheeled mobile robot, [x(t), y(t)] is the position coordinate of the wheeled mobile robot in the plane Cartesian coordinate system, θ is the heading angle of the wheeled mobile robot, and θ∈( -π, π], v, ω are the actual linear velocity and angular velocity of the mobile robot respectively. Point Q is the reference center of mass of the mobile robot, [x ref (t),y ref (t)] is the reference position coordinates of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More