

Unmanned aerial vehicle and cross plate mechanism and control method thereof
A control method and machine cross technology, applied in the aviation field, can solve the problems of large space occupation, complex mechanical structure, and low flight efficiency, and achieve the effect of ensuring control flexibility, simple calculation method, and enhancing flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
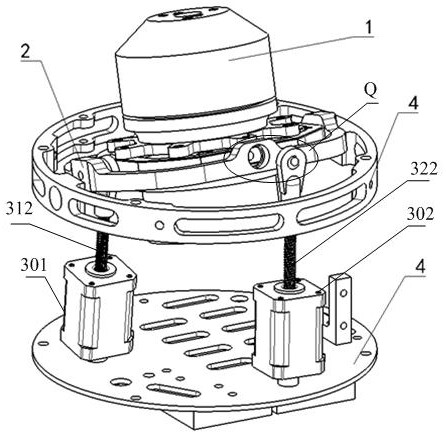
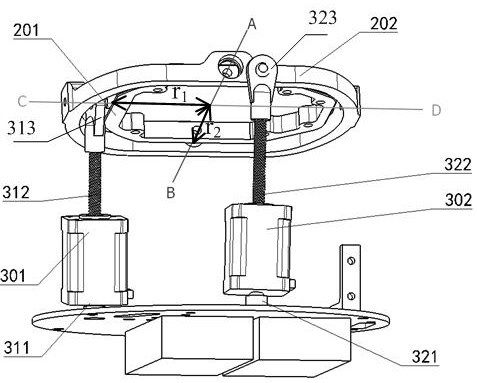
[0063] The invention discloses an unmanned aerial vehicle and its swashplate mechanism and control method, which uses a linear motor to control the angle adjustment of the swashplate, so that the driving process is more simplified and direct, the accuracy is higher, and the calculation method is simpler. And it can guarantee the control flexibility of the UAV.
[0064] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0065] In the UAV control method provided in the embodiment of the present invention,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More