

Distributed map fusion method based on adaptive Kalman filtering and average tracking
An adaptive Kalman and map fusion technology, applied in the field of control and information, can solve problems such as difficult to solve the mutual covariance of multiple agents
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
[0072] This embodiment takes a multi-agent system composed of three two-round agents as an example, and uses the distributed map fusion method based on adaptive Kalman filtering and average tracking of the present invention to obtain a global map of the agent's detection area.
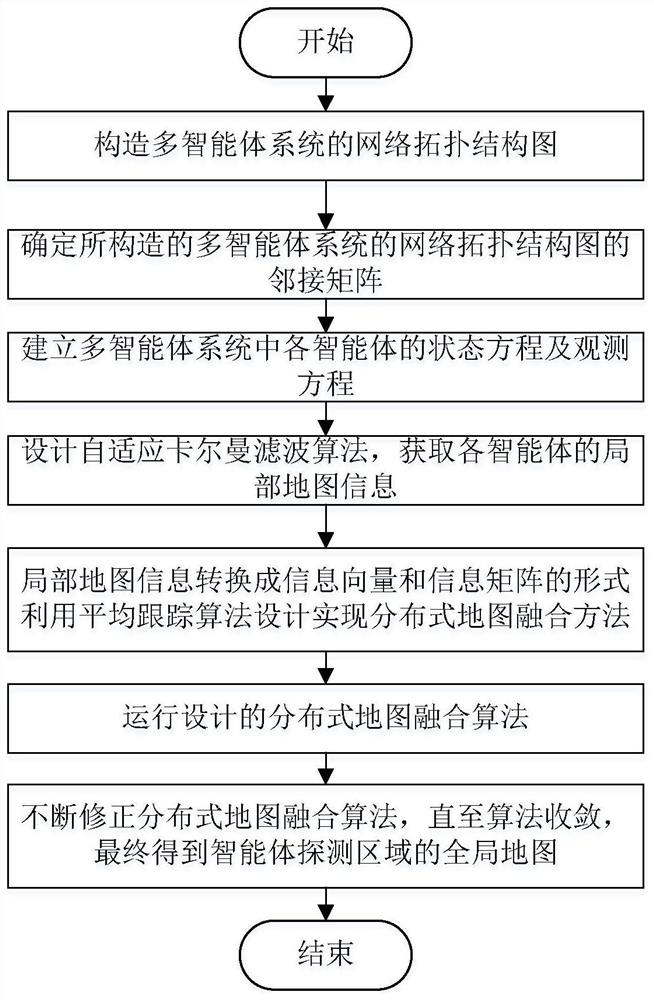
[0073] In this embodiment, the distributed map fusion method based on adaptive Kalman filtering and average tracking, such as figure 1 shown, including the following steps:
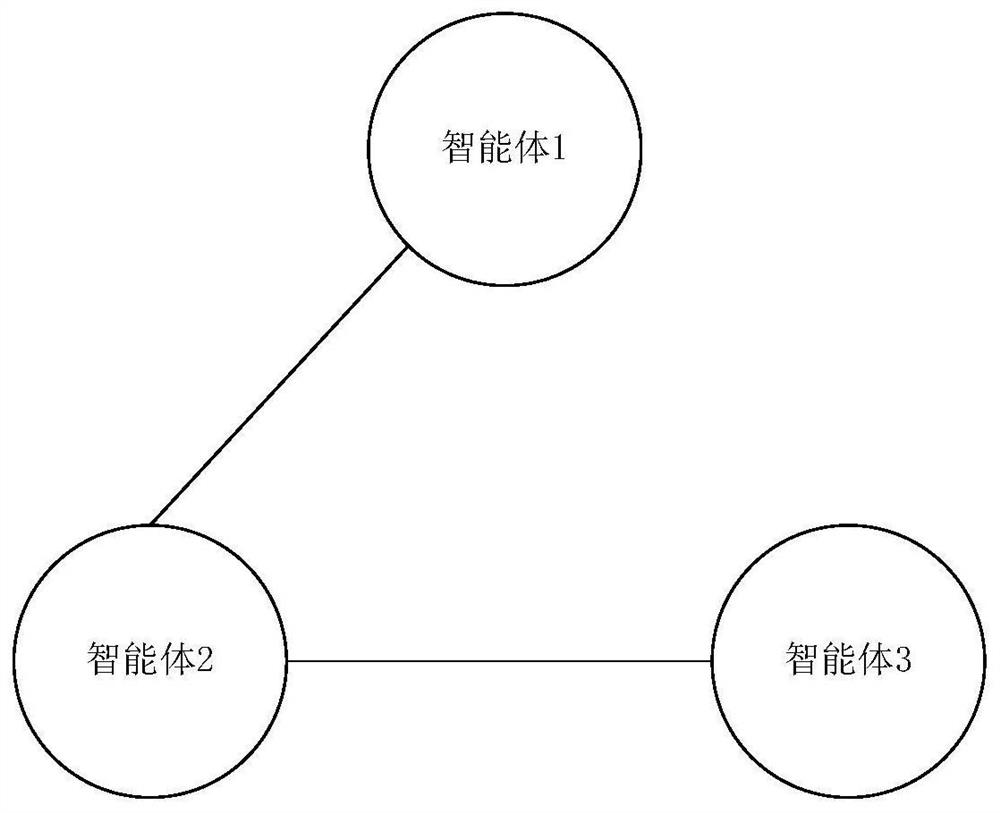
[0074] Step 1: Construct the network topology diagram of the multi-agent composed of three two-round agents, such as figure 2 As shown, each node represents an agent, and each edge represents the information interaction bet...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More