

Optimized ORB algorithm based on combination of RGB-D camera and plane detection and random sampling consistency algorithm
A technology with consistent sampling and algorithm, applied in the field of optimizing ORB algorithm, can solve the problems of poor practicability, large amount of calculation, and increased cost of mobile robots, and achieve the effect of improving positioning accuracy and real-time performance, improving accuracy and improving accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
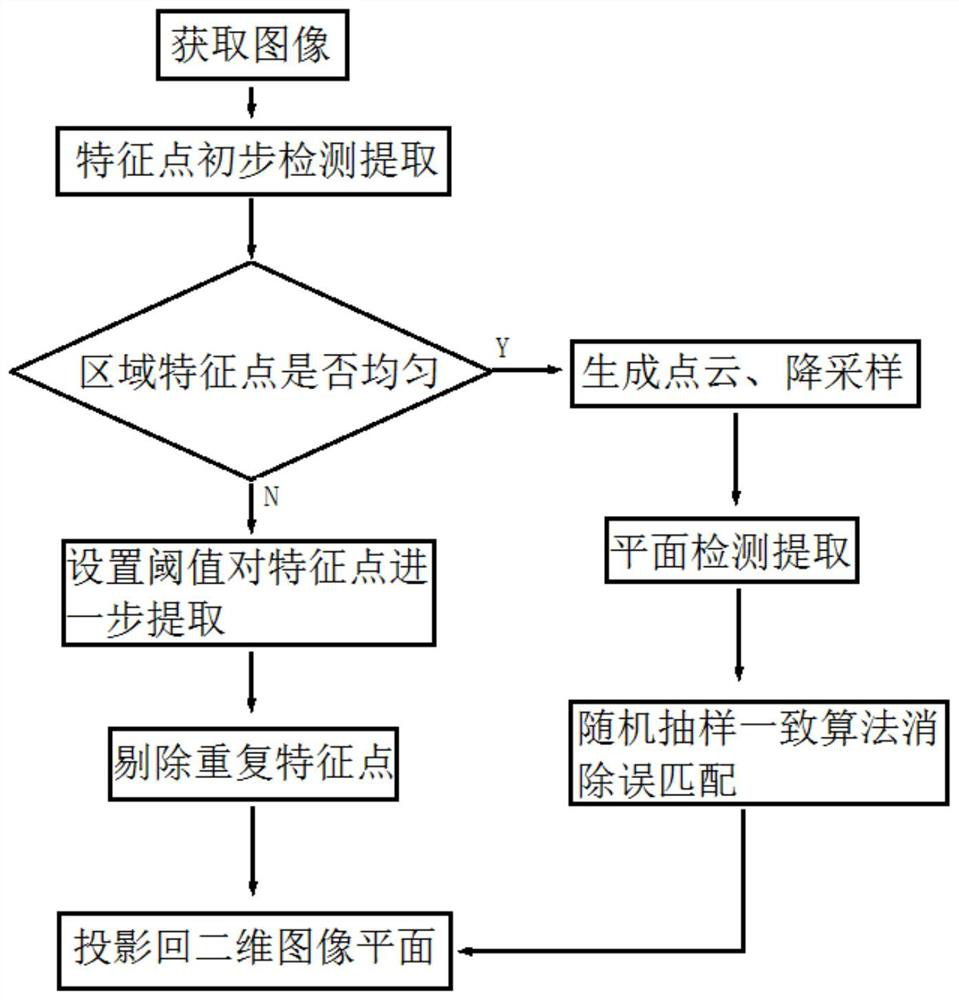
[0054] like figure 1 As shown, an optimized ORB algorithm based on RGB-D camera combined with plane detection and random sampling consensus algorithm, the method includes the following steps:
[0055] S1: Use an RGB-D camera to acquire image data, including color images and depth images;
[0056] S2: Use the ORB algorithm to extract feature points from the image data, and use the feature point uniformity evaluation method to judge the feature point distribution uniformity;
[0057] S3: For the part of the image data where the feature points are evenly distributed, generate a point cloud and downsample it;
[0058] S4: Perform plane detection and extraction on the down-sampled point cloud, and use the random sampling consensus algorithm to eliminate false matches;
[0059] S5: For the part of the image data with uneven distribution of feature points, use the set threshold for feature point extraction and the non-maximum value suppression method to eliminate overlapping featur...
Embodiment 2
[0104] The difference between this embodiment and Embodiment 1 is: in S21, m=9; in S42, if the remaining points of the point cloud are greater than 40% of the total or the extraction planes are less than 5, feature points are extracted.
Embodiment 3
[0106] The difference between this embodiment and Embodiment 1 is: in S21, m=10; in S42, feature points are extracted if the number of remaining points in the point cloud is greater than 20% of the total or the extraction plane is less than 4.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More