Navigation system based on differential wheel set AGV and control method
A technology of navigation system and differential wheel, which is applied in the field of AGV navigation system, can solve problems such as inability to realize continuous omnidirectional movement and inability to apply the navigation system of Mecanum wheel AGV, so as to save steering space, improve anti-interference ability, The effect of improving navigation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] First of all, it needs to be explained that the orientation words such as up, down, left, right, front, and back described in the present invention are only described according to the accompanying drawings, so as to be easy to understand, and are not intended to limit the technical solution and scope of protection of the present invention. .
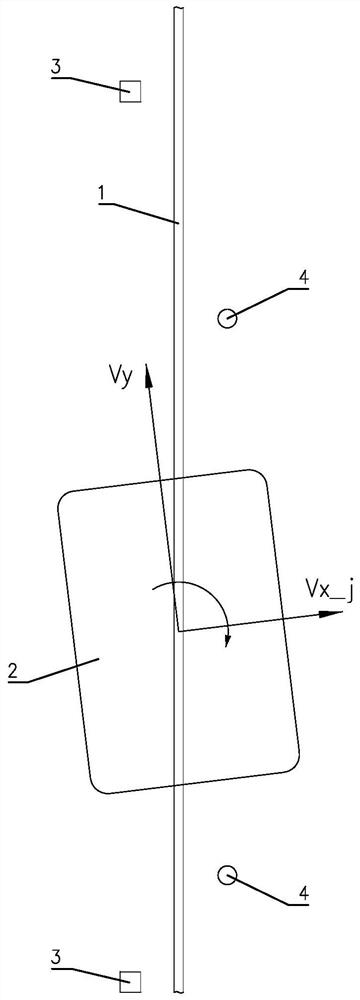
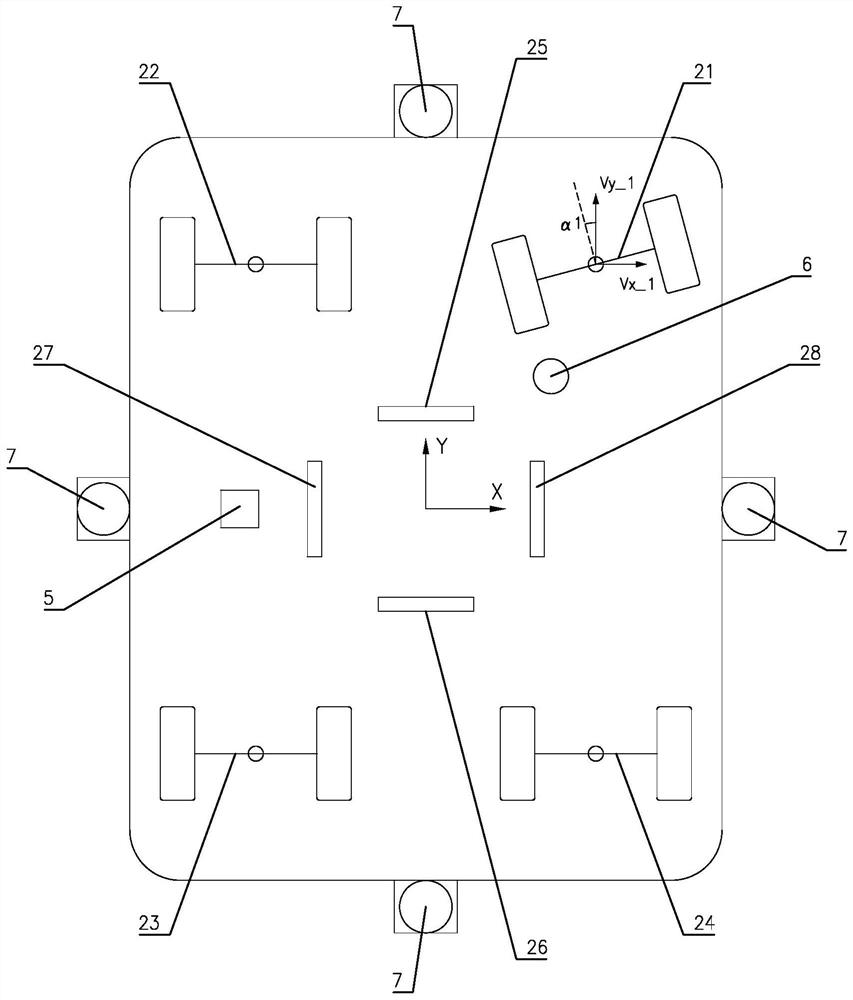
[0054] like figure 1 and figure 2 Shown is a specific implementation of a navigation system based on a differential wheel set AGV of the present invention, including a navigation path 1 and an AGV 2 . Make the navigation path adopt the navigation magnetic strip set on the ground. The AGV is equipped with four center-symmetrically distributed differential wheel sets and four center-symmetrically distributed magnetic navigation sensors. Among them, the differential wheel set is provided with two symmetrically distributed drive wheels, and the magnetic navigation sensor is used to collect navigation path information. Through the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com