

Fault Tolerant Control Method for Discrete Uncertain Multi-Delay Quadrotor System
A quad-rotor system, fault-tolerant control technology, applied in the field of sliding mode predictive fault-tolerant control, can solve problems such as insufficient research on fault-tolerant problems of multi-delay systems, and achieve a balance between local development capabilities and global search capabilities, good convergence speed, and improved fault tolerance. The effect of controlling precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
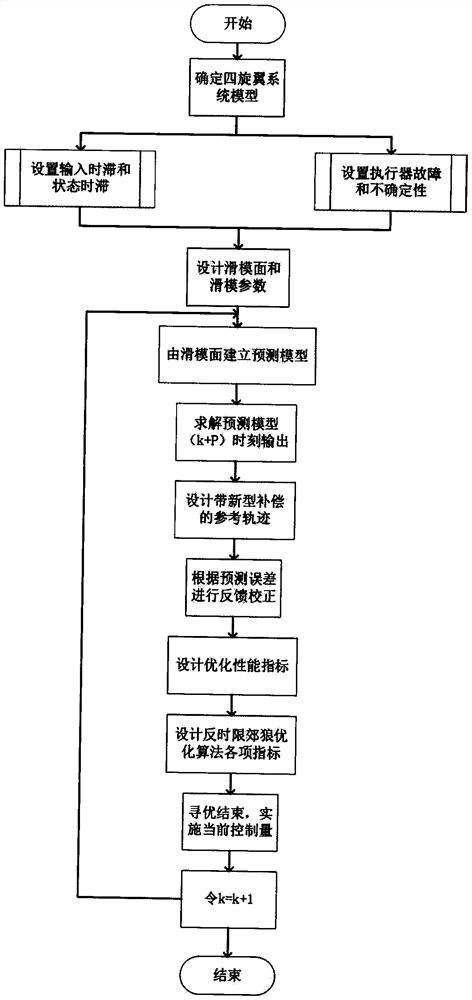
[0099] The present invention will be further explained below in conjunction with the accompanying drawings.
[0100] Such as figure 1 As shown in , in order to eliminate the approaching process of the system state, the system state is located on the sliding surface from the beginning to ensure the global robustness, and the quasi-integral sliding surface is designed as the prediction model; considering multiple time delays, faults, uncertain In order to reduce the influence of time-delay and disturbance on the system, a double-power function reference trajectory that can effectively weaken the influence of time-delay on the system is designed; and an improved fault compensation is added to the design of the reference trajectory, which reduces the bandwidth of the quasi-sliding mode and improves the Control accuracy; in the rolling optimization algorithm design, an improved inverse-time coyote optimization algorithm is designed; on the basis of the traditional coyote algorithm,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More