

Robot power supply current threshold value acquisition and exception handling method
A robot power supply and exception handling technology, which is applied in the field of intelligent robots, can solve problems such as rough threshold, troubleshooting of unfavorable problems, loss of abnormal information and other key information, and achieve the effect of convenient troubleshooting and reducing mistakes or misjudgments
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0039] A robot power supply current threshold acquisition and abnormal processing method in the present invention is applied to a system composed of a power management module, a backup battery, a storage module and upper computer software.
[0040] In order to obtain a general and suitable threshold, first close the threshold judgment program, and then send a threshold calculation command to the main control module through the host computer during the normal operation of the robot. After receiving the command, the main control module will cycle within the time required by the command. Perform the following operation procedure, see figure 1 :
[0041] A. Collect the channel current information I connected to the electrical equipment x ;
[0042] B. Compare Ix with the current maximum value I Max compare, if greater than I Max , will I x assigned to I Max ;
[0043] C. Compare Ix with the current minimum value I Min compare, if less than I Min , will I x assigned to I ...
Embodiment 2
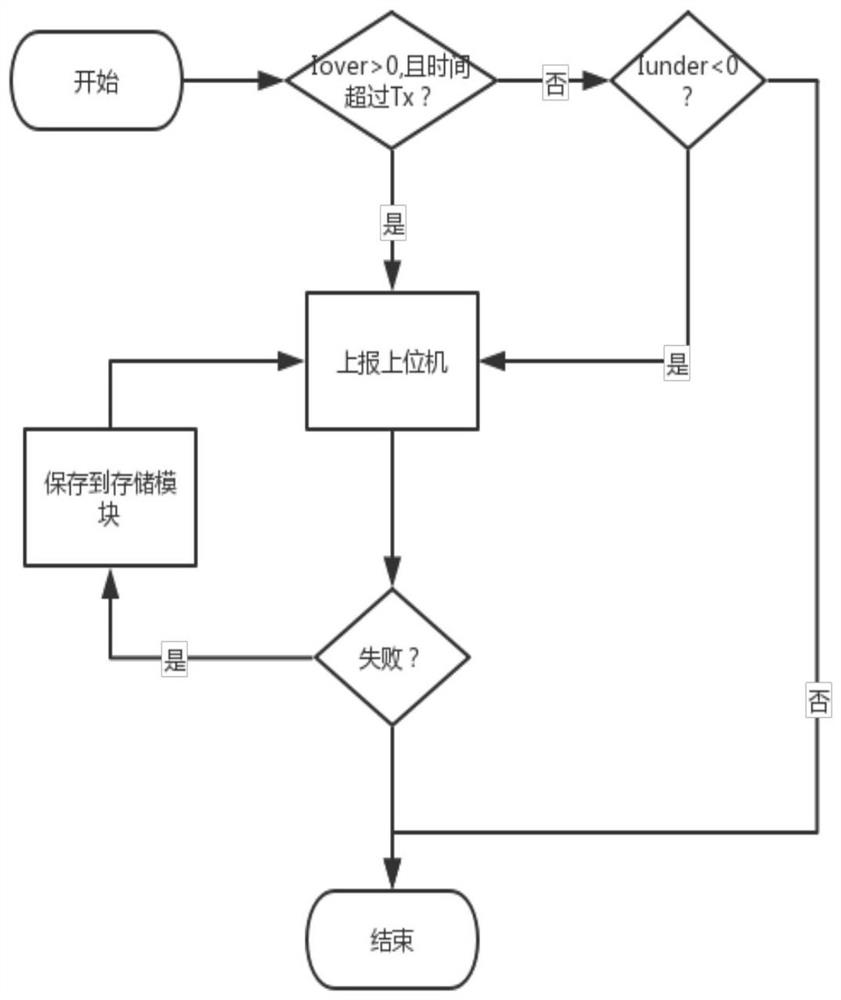
[0053] This embodiment relates to the specific steps of judging and processing of overcurrent and power failure, such as figure 2 shown, including:
[0054] A. Overcurrent: If I over greater than 0 and the time exceeds T x, then it is judged as overcurrent. When the overcurrent occurs, the corresponding power supply channel will be closed, and then the current information and time stamp information before and after the overcurrent will be reported to the host computer. If the communication with the host computer fails, the information will be saved to the storage module. until the next communication succeeds.
[0055] B. Power down: if I under If it is less than 0, it is judged as a power failure. When a power failure occurs, the current information and time stamp information before and after the power failure are reported to the host computer. If the communication with the host computer fails, the information is saved to the storage module until the next communication is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More