

Method for establishing basic coordinate system of space positioning system
A space coordinate system and space positioning technology, applied in positioning, radio wave measurement system, complex mathematical operations, etc., can solve the problems of no substantive description, no flexibility, low precision of the reference coordinate system, etc., to improve installation and debugging efficiency, convenient control and measurement, and low algorithm complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0042] combined with Figure 1 to Figure 6 Description of this embodiment: a method for establishing a basic coordinate system for a space positioning system, the steps for establishing a basic coordinate system are:
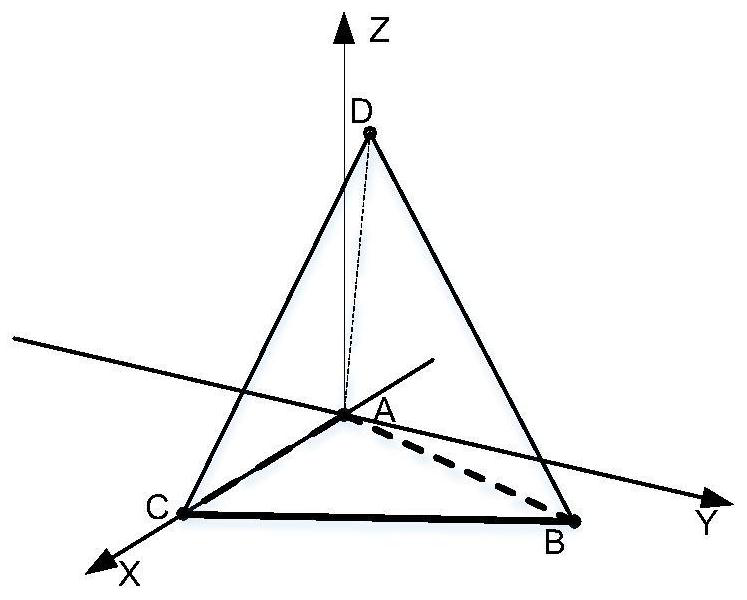
[0043] In the case of satisfying the local area distribution density of distributed local positioning base stations, randomly install at least four non-coplanar base stations A, B, C, and D to form a basic positioning system, and the signal coverage of the four base stations has a common signal area;
[0044] The steps to establish a left-handed spatial positioning system are as follows: take the base station A as the coordinate origin, and the vector formed by the base stations A and B Is the X axis, with the X axis as a reference, establishes the Y axis in the plane ABC, and the Z axis points to the vertical direction where the base station D is located, and constructs a left-handed spatial coordinate system;
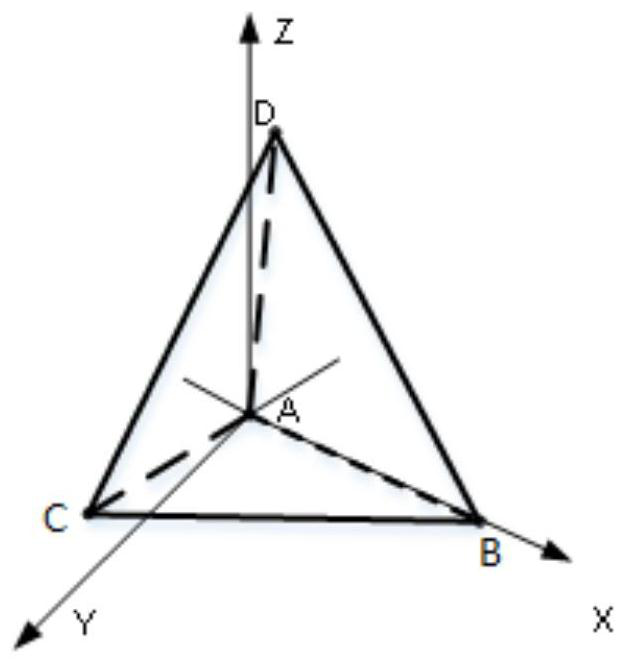
[0045] The steps to establish a right-handed s...
Embodiment 2
[0049]This embodiment is described in conjunction with Embodiment 1. The distance between two base stations is obtained by measuring each other between the base stations in the basic positioning system, which are expressed as
[0050]
[0051] By setting each orientation vector, it is convenient for subsequent calculations.
[0052] For further optimization, a virtual coordinate system is established based on the right-handed spatial positioning system, where
[0053] The coordinates of base stations A, B, C, and D are A(0,0,0), B(X B ,Y B ,0), C(b,0,0), D(X D , Y D ,Z D ),
[0054] in,
[0055] S represents the area of △ABC,
[0056]
[0057] but
[0058] V represents the volume of the triangular pyramid D-ABC
[0059]
[0060] G=(c 2 +d 2 -e 2 ) 2
[0061] H=(b 2 +d 2 -f 2 ) 2
[0062] K=(b 2 +c 2 -a 2 ) 2
[0063] but:
[0064]
[0065] when d 2 -Z D 2 -X D 2 >0,
[0066]
[0067] d 2 -Z D 2 -X D 2 =0, Y D =0.
[...
Embodiment 3
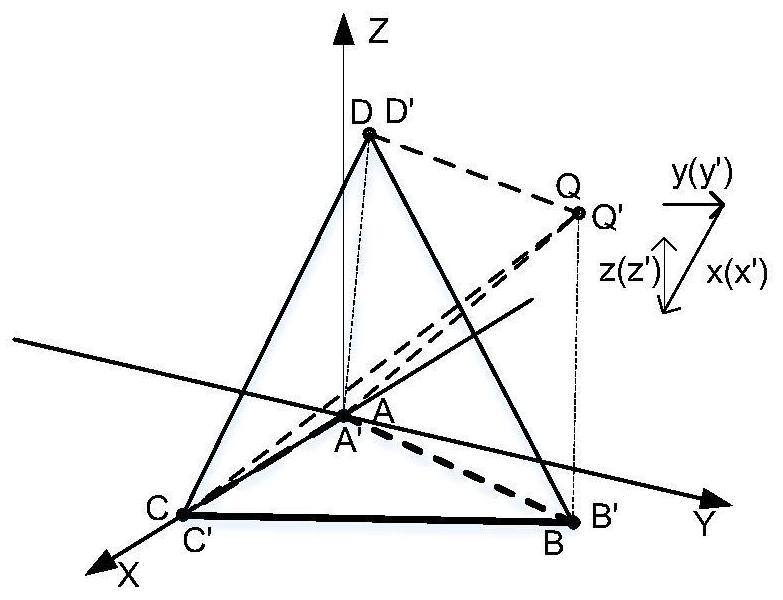
[0070] This embodiment is described in conjunction with Embodiments 1 and 2. The positions of the actual base stations A', B', C', and D' in the virtual coordinate system are the mapping of the lengths between any two base stations, namely Among them, A', B', C', D' and A, B, C, D are respectively mapped to each other. According to such a mapping relationship, the virtual coordinate system and the coordinate system corresponding to the actual base station are mirrored or consistent.
[0071] As a preference, when the points in the right-handed coordinate system correspond one-to-one with the virtual mapping points and the positions are consistent, move the beacon Q in space and move along the y→x→z trajectory, and in the virtual coordinate system, a Point Q' moves along y'→x'→z', and the vector coordinate system formed by this moving track is the right-handed spatial coordinate system track;
[0072] Furthermore, when the point in the left-handed coordinate system mirrors t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More