

Non-blind area intelligent feedback control system, method and terminal for unmanned inspection equipment
A feedback control system and feedback control technology, applied in the direction of control/adjustment system, non-electric variable control, two-dimensional position/channel control, etc., can solve problems such as easy to get lost, limited use environment, poor synchronization accuracy, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
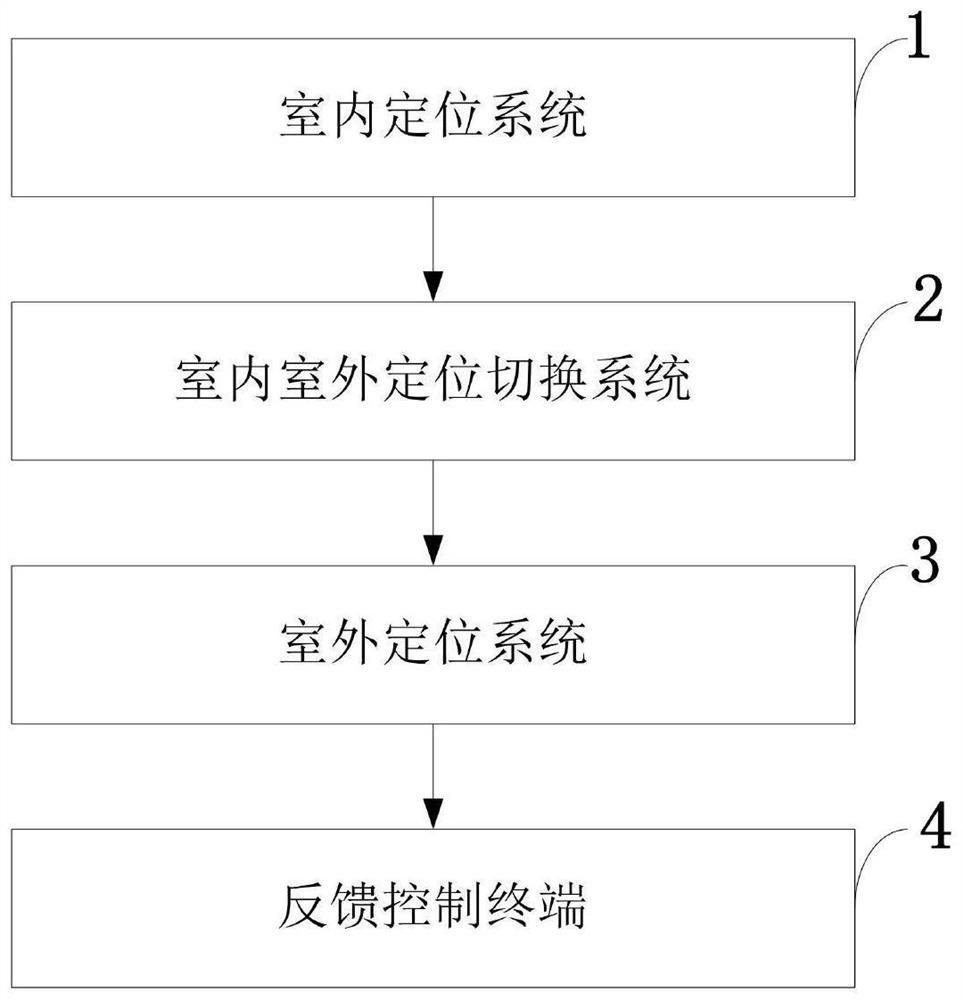
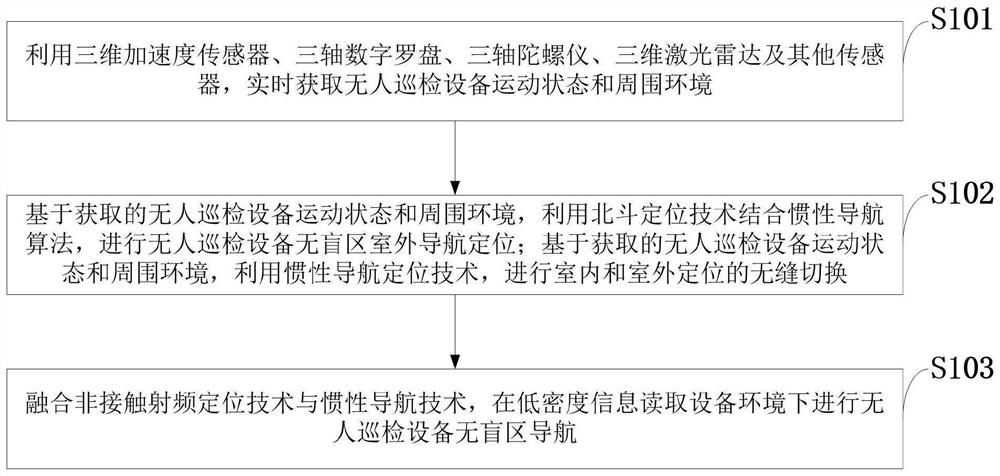
[0094] In the outdoor environment, based on Beidou positioning, it integrates sensors such as three-dimensional acceleration sensor, three-axis digital compass, three-axis gyroscope, and three-dimensional laser radar to obtain the motion status and surrounding environment of unmanned inspection equipment in real time, and develop inertial navigation algorithms. Form a non-blind zone navigation and positioning terminal module that integrates Beidou high-precision positioning and inertial navigation. In the indoor environment, the high integration of non-contact radio frequency positioning technology and inertial navigation technology is studied to realize blind-spot navigation in the environment of low-density information reading equipment. At the same time, based on the inertial navigation positioning technology, the seamless switching between indoor and outdoor positioning is studied to realize high-precision positioning with automatic connection between indoor and outdoor. B...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More